This is something I really wanted to like. I really want to get behind a product that breaks down a barrier to entry of a hobby. But alas it’s not the miracle product that I hoped it to be.

This is something I really wanted to like. I really want to get behind a product that breaks down a barrier to entry of a hobby. But alas it’s not the miracle product that I hoped it to be.
I made(*) this tiny remote control for Sony Alpha cameras.
It can do what other camera remotes do, and I jam packed it with other weird features, features that I would like to see baked into the actual camera’s firmware.

This is a tool made to transfer and backup photos from a professional camera while in-the-field. Built with a Raspberry Pi 4 (other Pis will work too, it’s all just Python code), using Wi-Fi for file transfers and USB disks for file storage, powered by batteries.

I’m having so much fun with my new Beamo laser cutter! I designed and made this wooden orrery with my Beamo. It’s a mechanical toy that depicts the position of the Earth and Moon as they orbit each other and the Sun, with artwork showing the moon phases and Zodiac. See more pictures and animation:
I finally took the plunge and bought myself my very own laser cutter! It’s a cute little Flux Beamo!
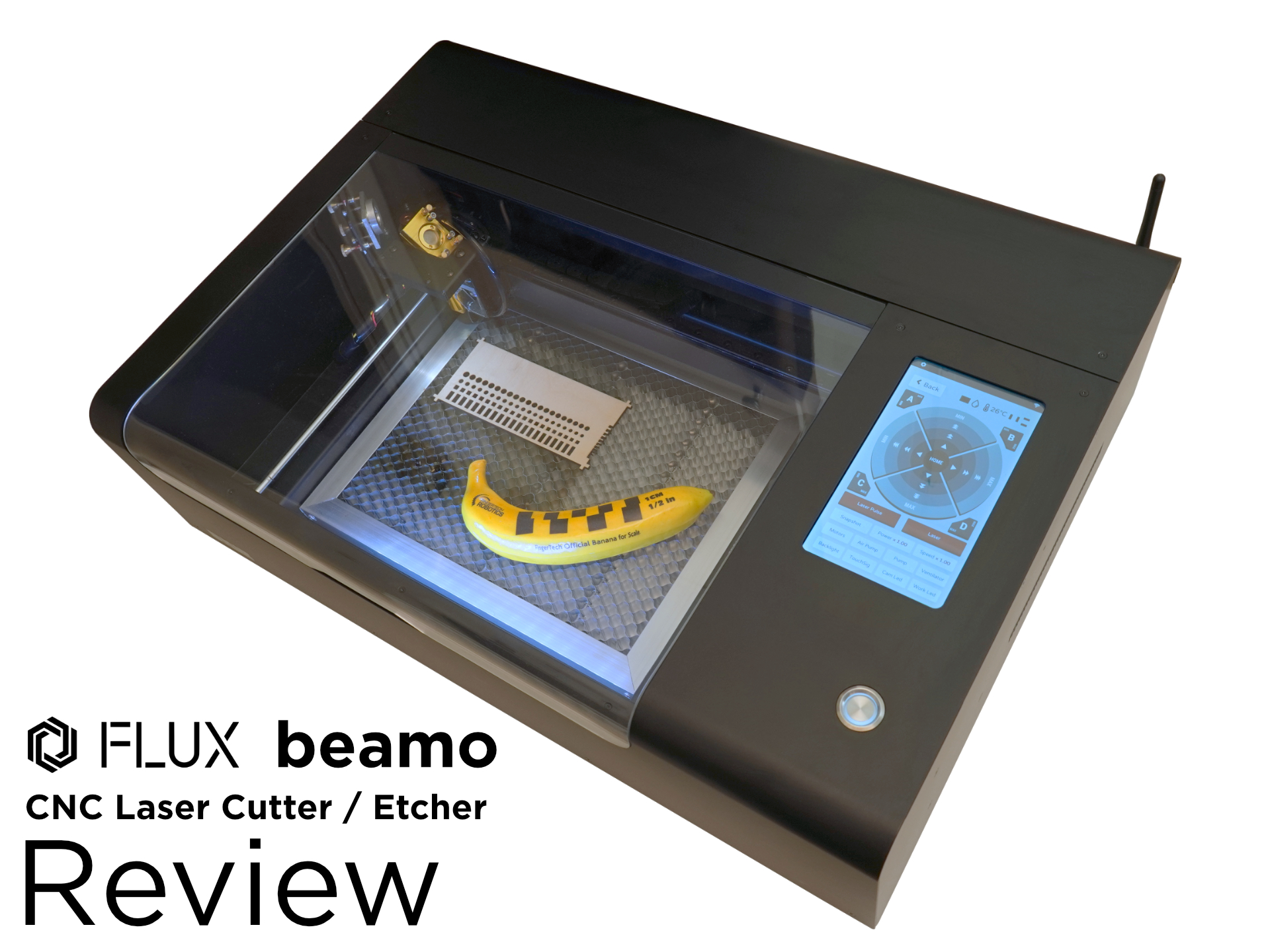
A small but modern 30W CO2 CNC laser cutter/engraver. Here’s what I think of it…
It’s nearly Christmas again! I’ve started to learn a new craft, an ancient one, and started to mix it up with modern technology.
Behold, stained glass suncatcher with embedded LEDs

This is essentially black magic to most glass artists and a huge “duh” moment to all the makers and engineers. I’ve been asked to teach how this is done…
I’ve had some fun with photogrammetry recently and wanted to try out other techniques for 3D scanning. I’ve actually sort of accomplished S.L.A.M. during a hackathon using the PlayStation 4 camera and the Xbox One Kinect already, but I wanted something portable! With the new Raspberry Pi 4 debuting this year, I can finally accomplish this… sort of…
I’ve been experimenting with 3D scanning objects outdoors with just a camera! Using Meshroom, an open source photogrammetry tool, I can process a bunch of photographs into a textured 3D model. I could use these models for 3D printing or as objects in a game engine. Anybody with a camera can do this! The caveat is that Meshroom only runs on computers with CUDA.
This is a mineral oil submerged computer. Mineral oil is a liquid that looks and behaves like water but does not conduct electricity, hence why it is safe to run electronics inside it. The mineral oil also aids to control the temperature of the entire system, by soaking up and removing heat away from hot components like the CPU.
You might have already seen my first computer, which was also an aquarium computer. Something mighty unfortunate happened to it… This new aquarium computer is built with all the lessons learned from the first. Please continue reading to find out the details
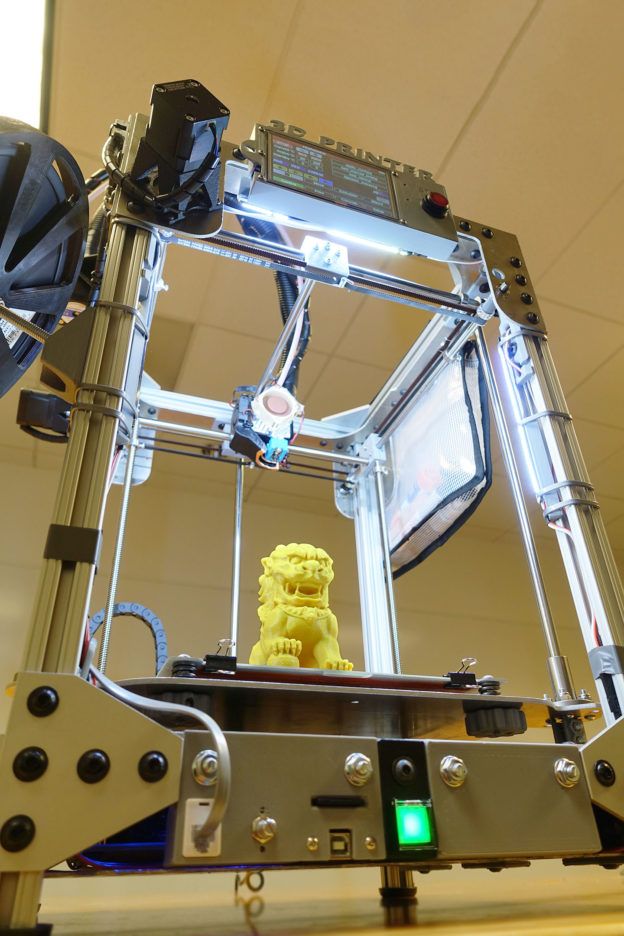
I finally did it, I designed and built my own 3D printer. This is in no way “the best 3D printer”. Instead, this was an epic and nightmare project that exercised my ability to engineer and build my own CNC machine. Along the way, I figured out what I did well and what I did badly, mistakes were made and sometimes fixed, even ignored.
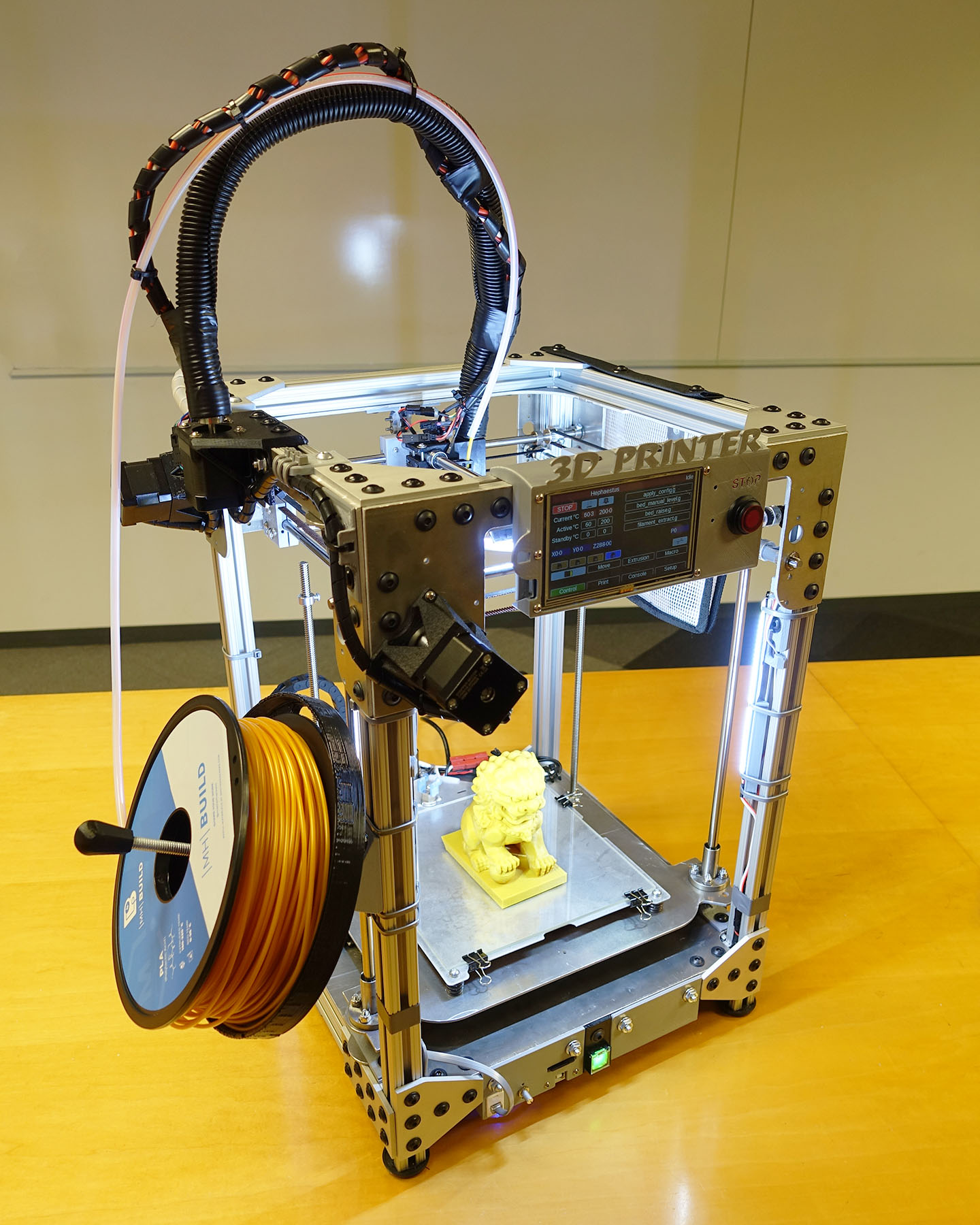
This 3D printer is named Haphaestus. This wasn’t some kit that I purchased and put together, this wasn’t some tutorial I downloaded and followed. I designed almost everything about this printer and built it with tools I own and a waterjet cutting service. The only application specific parts I didn’t design are the Duet controller circuit and the E3D Titan parts.
NOTE: This is not an open source project where I will let you download a few files so you can build one yourself, trust me… you don’t want to. It’ll be a logistical nightmare to just organize the files and BOM to the point where it is useful to anybody else.
This page will be dedicated to recording my experiences and analysis of the first 3D printer I have ever designed and built all by myself.
A few weeks ago, the library consulted me about teaching programming to kids. The Grand Avenue library is already using the CS First With Google and the West Orange library wants to start something similar and asked because of the previous robotics classes I’ve taught for them. While they could also try Google’s CS First, why not experiment with something else? Something a bit more hands on!
The library have always said they wanted to loan out Arduinos but it just can’t happen because of how much other stuff you must include with it before it becomes useful. It is impractical to expect the librarians to count wires and LEDs when an Arduino is loaned out.
So my targets were: low part count, easy to loan and return, full curriculum written.

I spend my Saturdays volunteering at a public library makerspace, the South San Francisco Public Library. I help people operate a few 3D printers, a CNC mill, vinyl cutter, etc. While preparing for my annual RoboGames entry, I thought it’d be cool to teach the library’s patrons about robotics.
I designed a robot kit, partly 3D printed, with electronics that has to be soldered, and running with an Arduino Nano. The three classes are for 3D CAD modelling, soldering, and programming.
The robots are designed to be cheap enough for the library to actually give away. All of my courseware is open source, hosted on GitHub. A lot of the tools and parts were donated by people I know in my professional circles.
Here’s a link to the class content: click here
This blog post is about what I observed, what I did right, what I did wrong.
Ha, that title makes me sound so evil.
See… this library actually leaves their 3D printers unsupervised, and the patrons use them how they please. I love it, getting people exposed to the latest tech is our goal. But this means that people do not realize how to properly remove filament from the printers, leading to tangles and knots in the filament spools. A single mistake could essentially render a $20 spool useless, it becomes a time bomb for printer jams, making people unhappy.
No amount of posters or instructions booklets could embed the same kind of discipline that a 3D printer owner has regarding filament treatment. Just a simple mistake of letting the filament go could cause a knot in the spool.
My solution… make them use cartridges that make it hard to make mistakes. These cartridges must be cheap, fast to make, easy to understand, reusable, and do not require modifying the printer to use. Don’t worry, there’s no DRM bull**** and they are adjustable to fit any standard spools. If my idea causes more problems than it solves, simply clip all the zip ties and go back to status-quo.

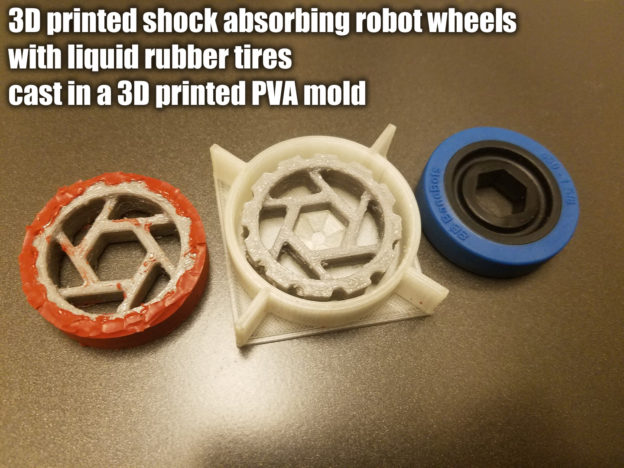
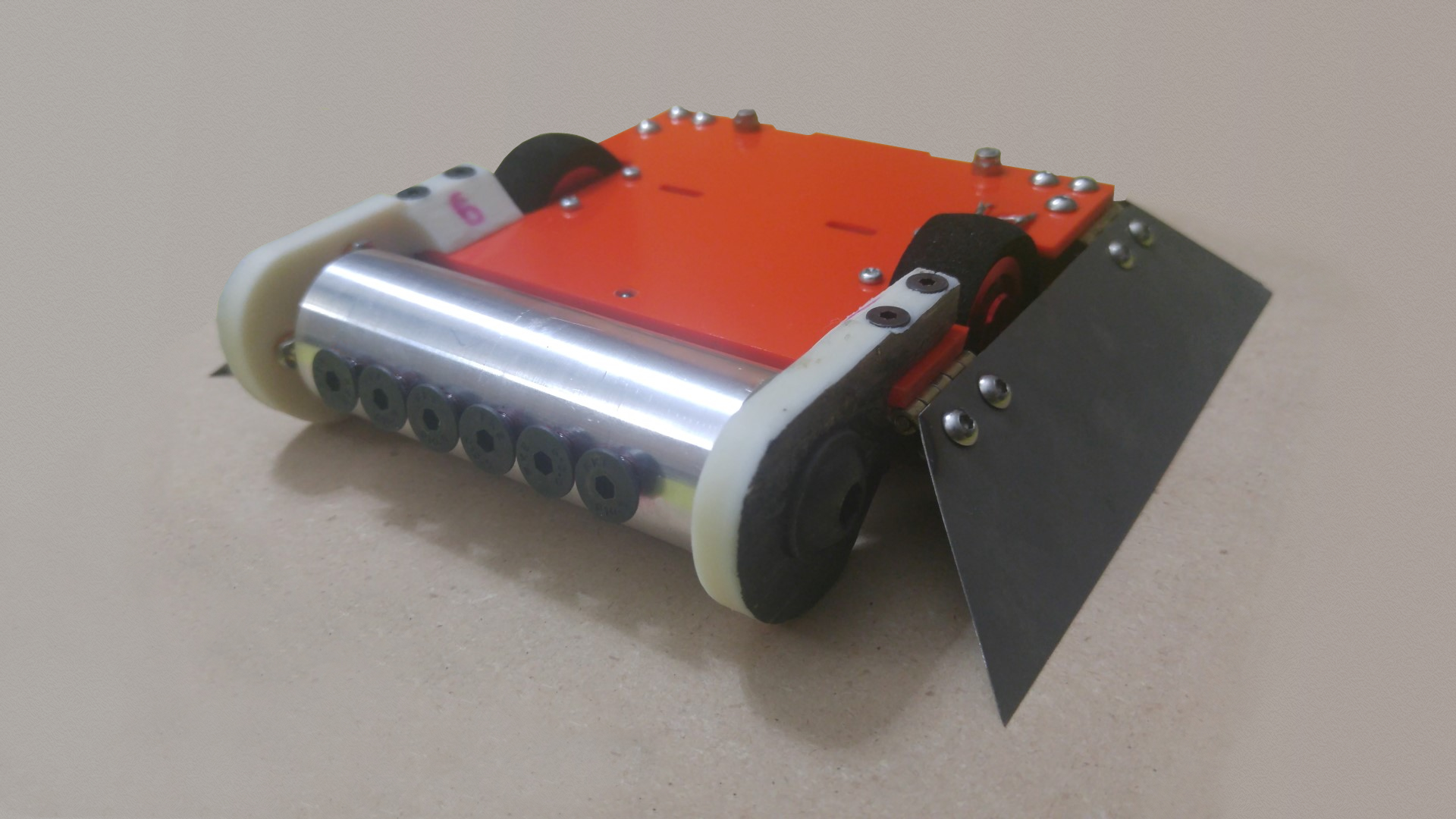
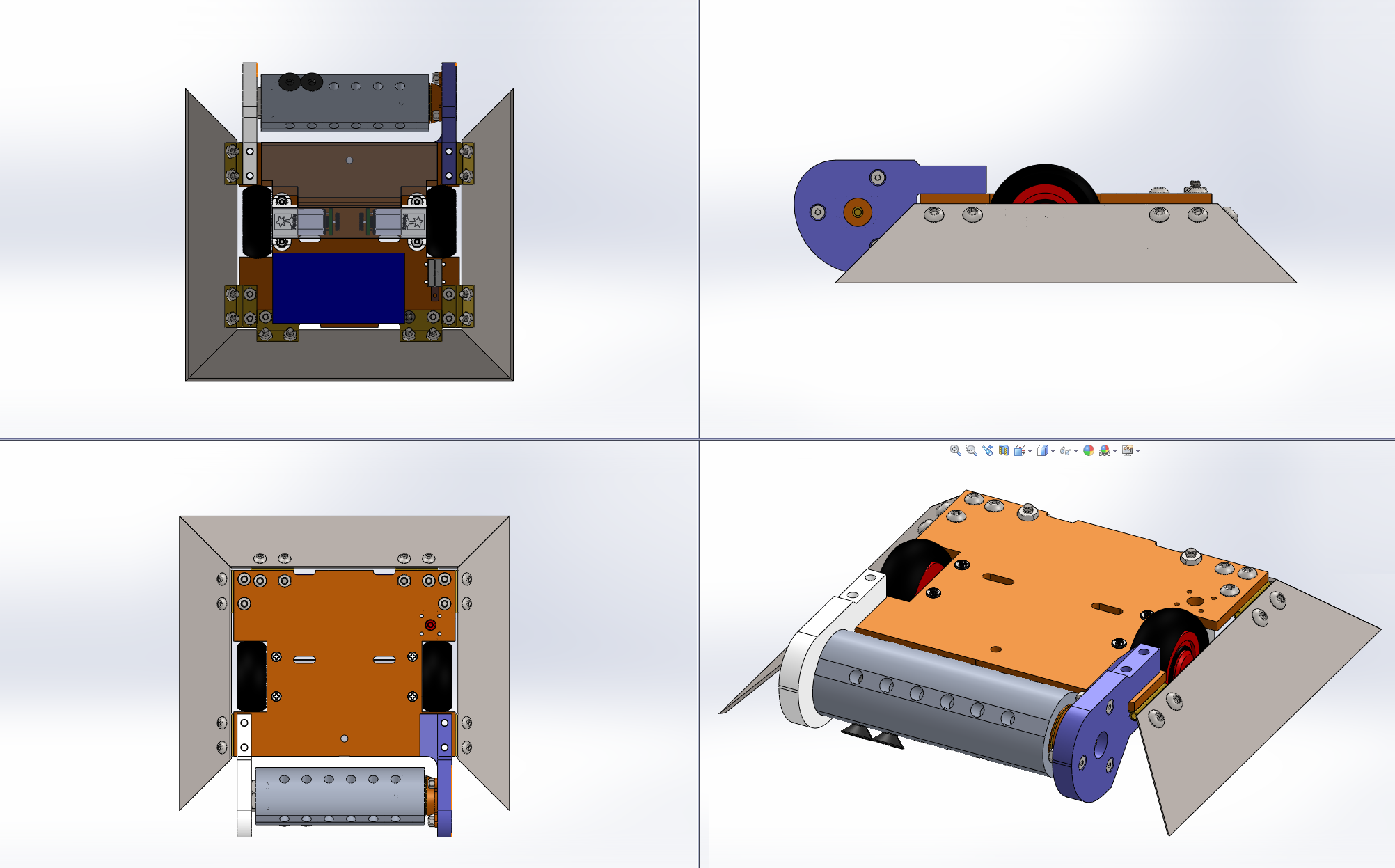
For my antweight combat robot DetCord, I wanted a wheel that could improve upon the Banebots wheels that I used before. I wanted something shock absorbing, which would extend the life of my gearboxes. The tires need to be soft and have high traction. The wheel does not have to be very strong because the robot has thick armour to protect the wheels.
I ended up with a cool way to make a wheel that’s cleaner than the more popular methods I see on the internet! Continue reading
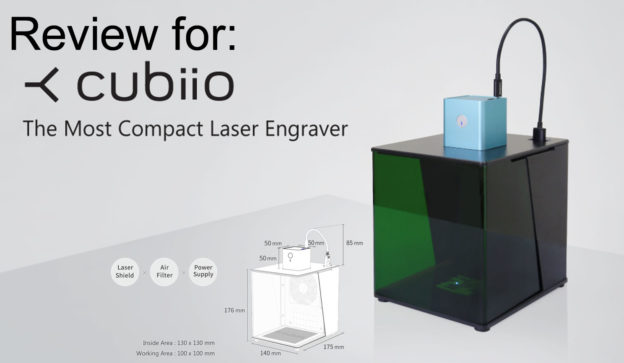
I backed a Kickstarter called Cubiio. It’s a palm sized cube shaped 800mW laser engraver. It is a rather controversial Kickstarter project. I have received and used mine for a bit and I have some personal opinions about it. This is going to be a real review, but from the perspective of an engineer and maker who is already deep into 3D printing and CNC milling. Unfortunately I am unwilling to fully tear it down for analysis as I actually do enjoy using Cubiio, so I can only speculate as to what is inside.
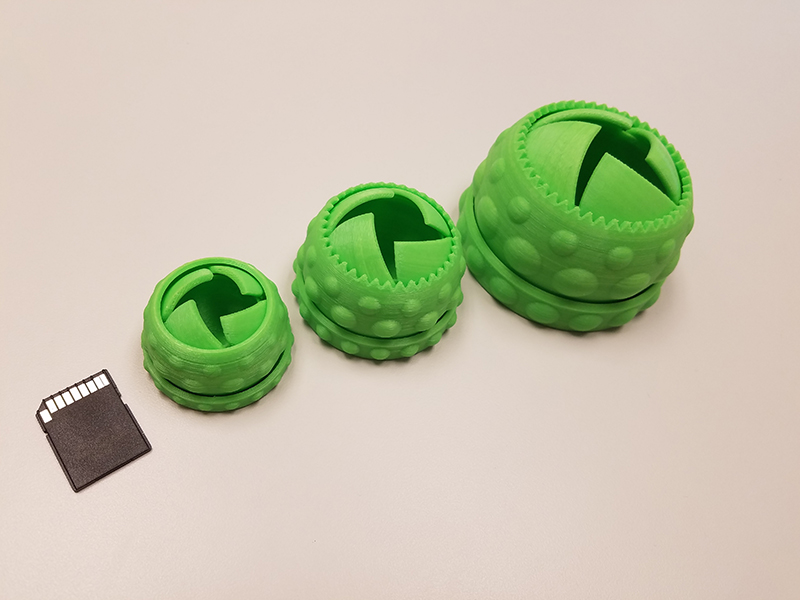
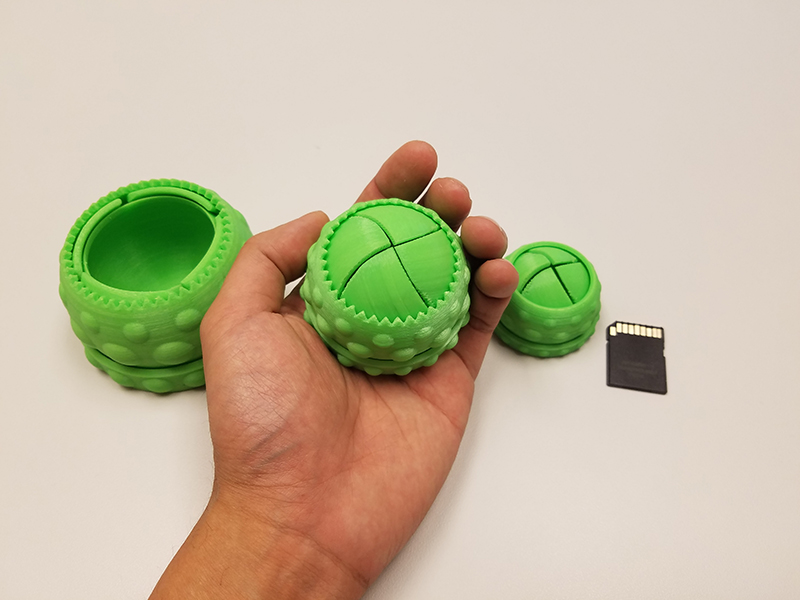
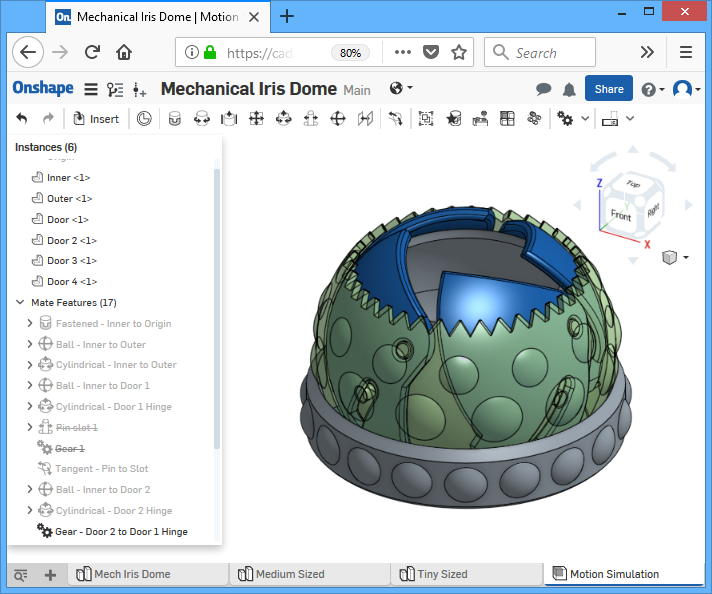
It’s that time of year when we think about gift giving. I decided to design a dome shaped box that opened with moving curved doors.

(dear iPhone users, sorry if the videos don’t work for you, please consider upgrading)
Keep reading for more pictures and a full tutorial teaching you how to create this in CAD.
I did a solo roadtrip from San Francisco to Portland so I can view the 2017 total solar eclipse with my friends in Salem!

Of course, I had to nerd it up a notch

This is the next step in my mission to make my car function 7 years newer and feel like a jet cockpit.
(click here if the above video isn’t loading)
I wanted a HUD, Heads Up Display to my car. The main purpose is to let me keep my eyes on the road and still be aware of my speed without looking down, hence “heads up”. This idea has been used in fighter jets for decades now.

I do not like any of the other ones on the market today, they all try to do “too much”. I wanted something more simple and elegant.
My design is a simple RGB capable individually controllable LED strip that reflect off my windshield.
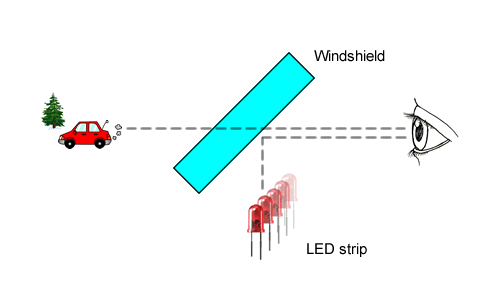
I used the “DotStar” from Adafruit Industries, which uses APA102 LEDs. The brain is a Teensy 3.2, which is connected to my car’s CAN bus via a OBD-II connector (the diagnostic port that you can read the engine computer from).




It is programmed to have three different modes: voltmeter, tachometer, and speedometer. The mode switching is “context aware”: When the car is moving, the mode changes to speedometer. If I rev the engine Continue reading

We did it, we said we were going to win and we did. We built something so technologically beautiful that Elon Musk himself crowned it the most innovative of them all.
I am proud to have served on a team where the exact combination of passionate people was key to achieving our success. Every ounce of effort mattered, every single nut tightened, every single wire connected, every word spoken. Thank you all for standing beside me through it all. You are all amazing, and no matter how little you came in with, I hope working together helped you learn, and set yourselves up for a better future.
This is my first ever combat robot! 454 grams (1 lb American Antweight class). It has a spinning drum weapon.Body is made of Garolite, with titanium skirts mounted on hinges (parts are cut on my Nomad 883 Pro, and some 3D printing). The drum weapon is CNC lathed aluminum with a brushless motor inside. The electronics is all custom built, utilizing the 802.15.4 radio integrated in the ATmega256RFR2.
Want more details? Continue reading
If you owned any good laptops, you might have a charger that had a curved shape, and/or a strap to help you wrap the cord. Well… The Microsoft Surface Pro 4 is an amazing computer but it’s charger doesn’t even have a strap. So I’ve decided to solve this problem with 3D printing.
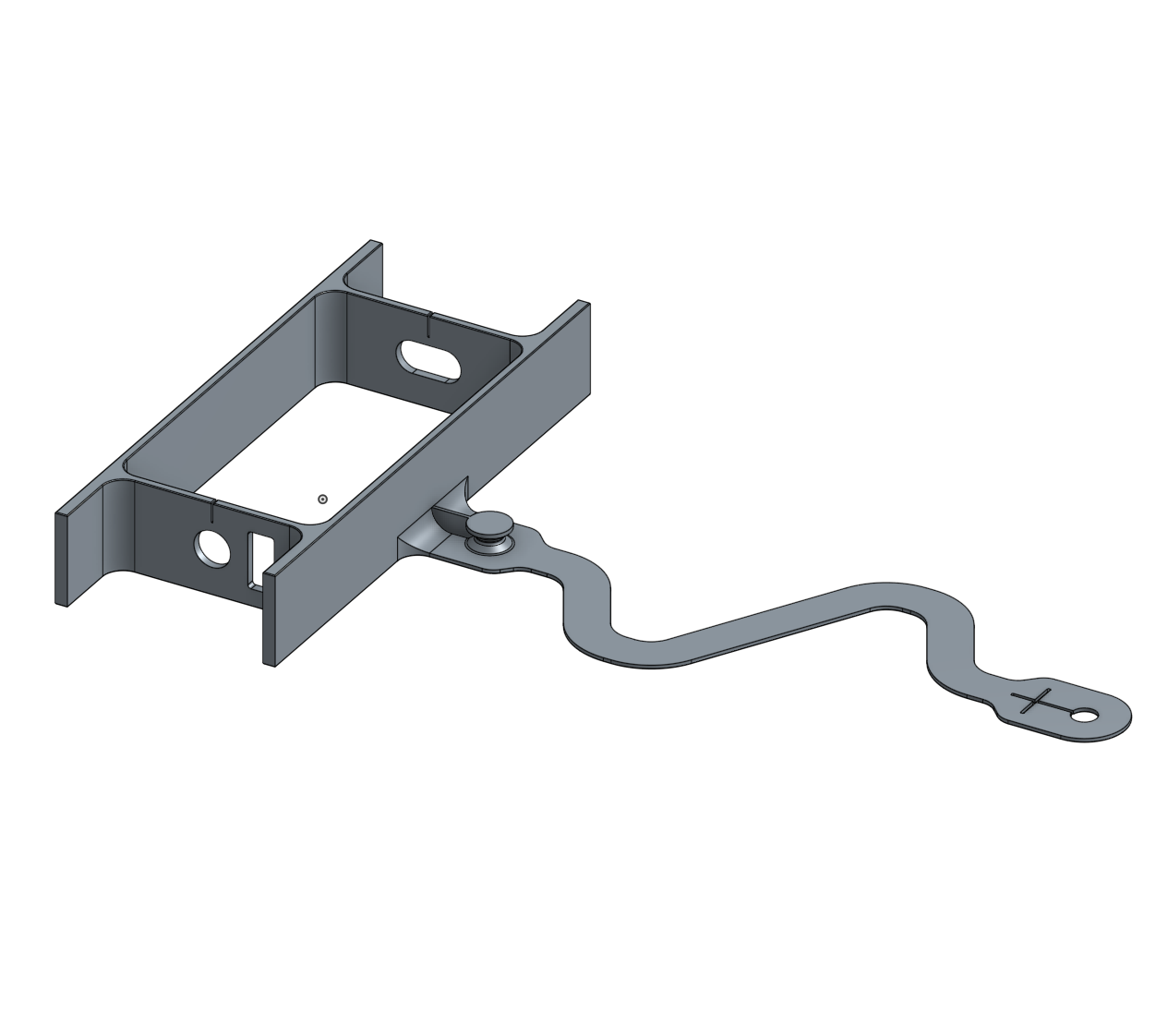

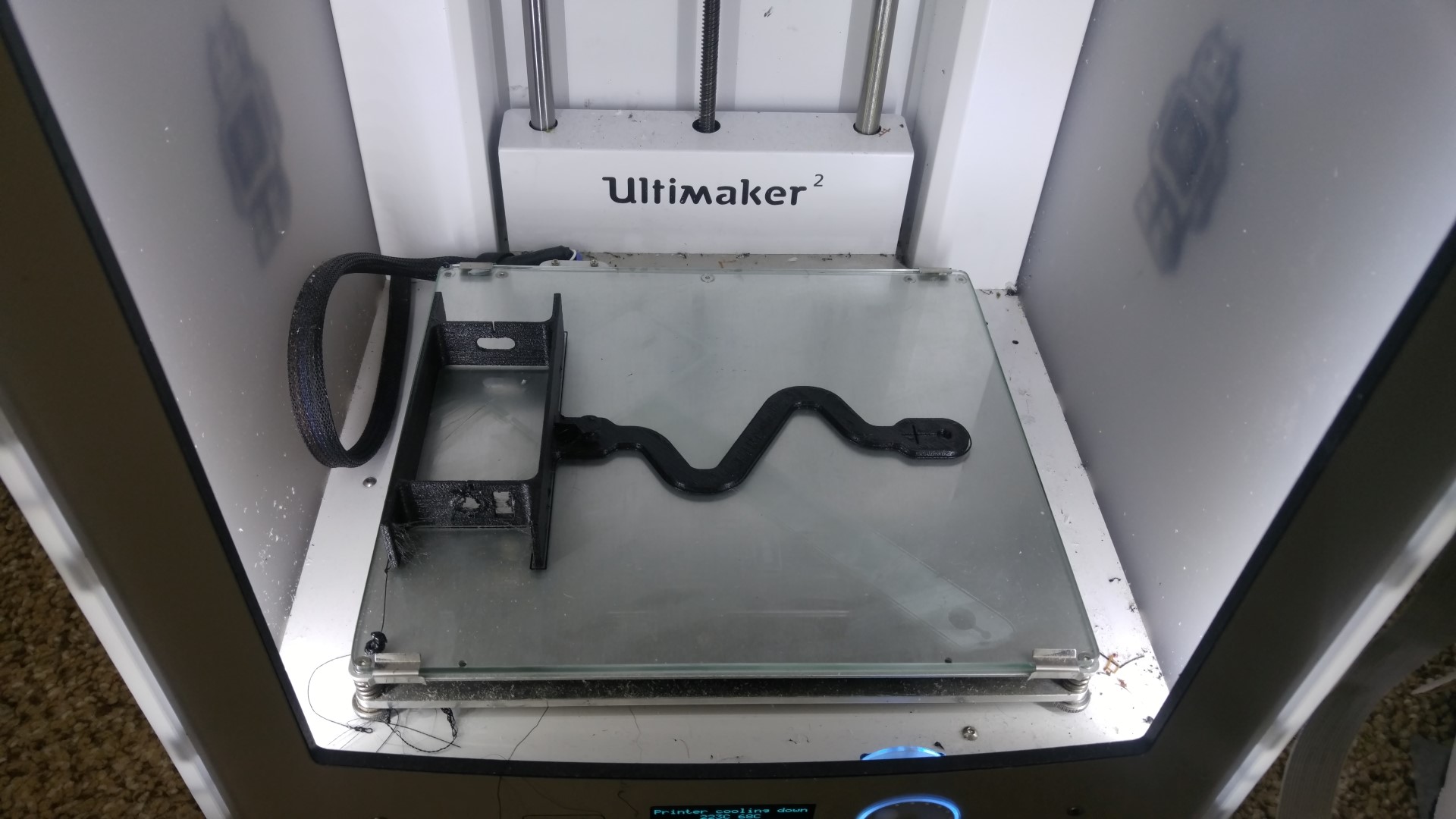

The filament I used is actually black 3mm polyurethane filament, which is both strong and flexible. Printed using my Ultimaker2, upgraded with a Flex3Drive, at 250 degrees C, layer height of 0.2mm, and 200% extrusion.
Funny that the strap would’ve been too long to be printed straight, that’s why I made it squiggly.
The model file is shared as a public model on Onshape here. Go ahead and download it, or even copy it to your own account to make modifications.