Most micro (palm sized) quadcopters are RTF and comes with a crappy cheap transmitter, and I really want to use my awesome expensive Taranis. I found out that Q-Bot comes with a tiny transmitter module that I can connect to my Taranis.
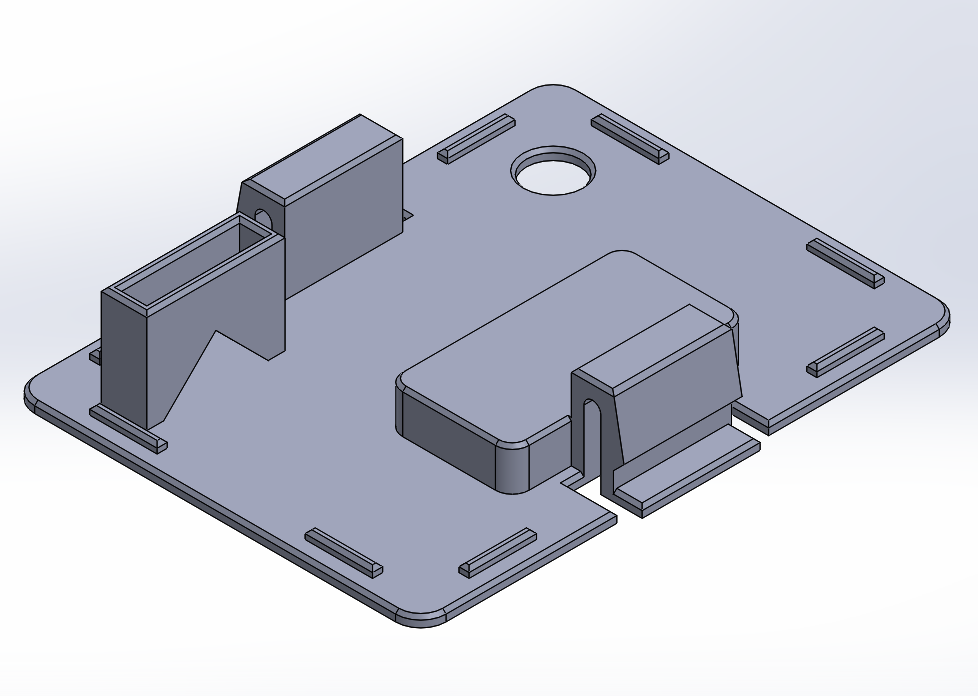
I didn’t want some ugly thing dangling off of my Taranis so I decided to 3D print a module that will contain the Q-Bot transmitter circuitry and plug into the Taranis’ module bay, which fits “JR” style transmitter modules.


and here is what it looked like before:

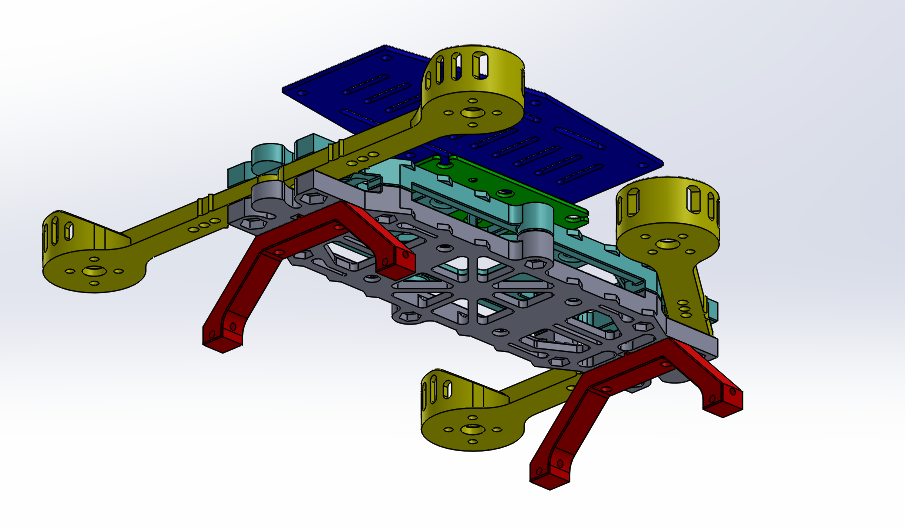
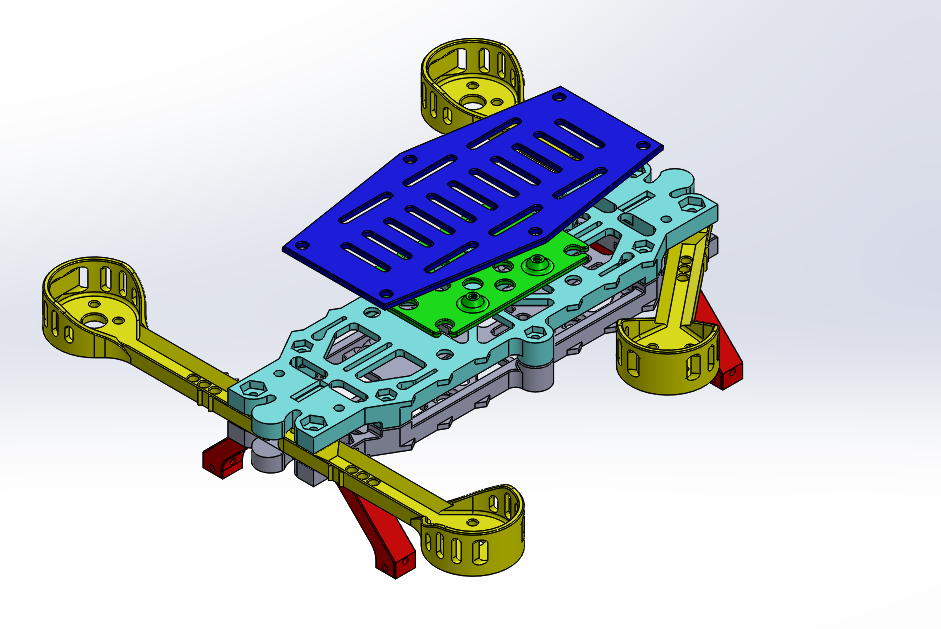
The 3D files (SLDPRT, STEP, STL) Continue reading