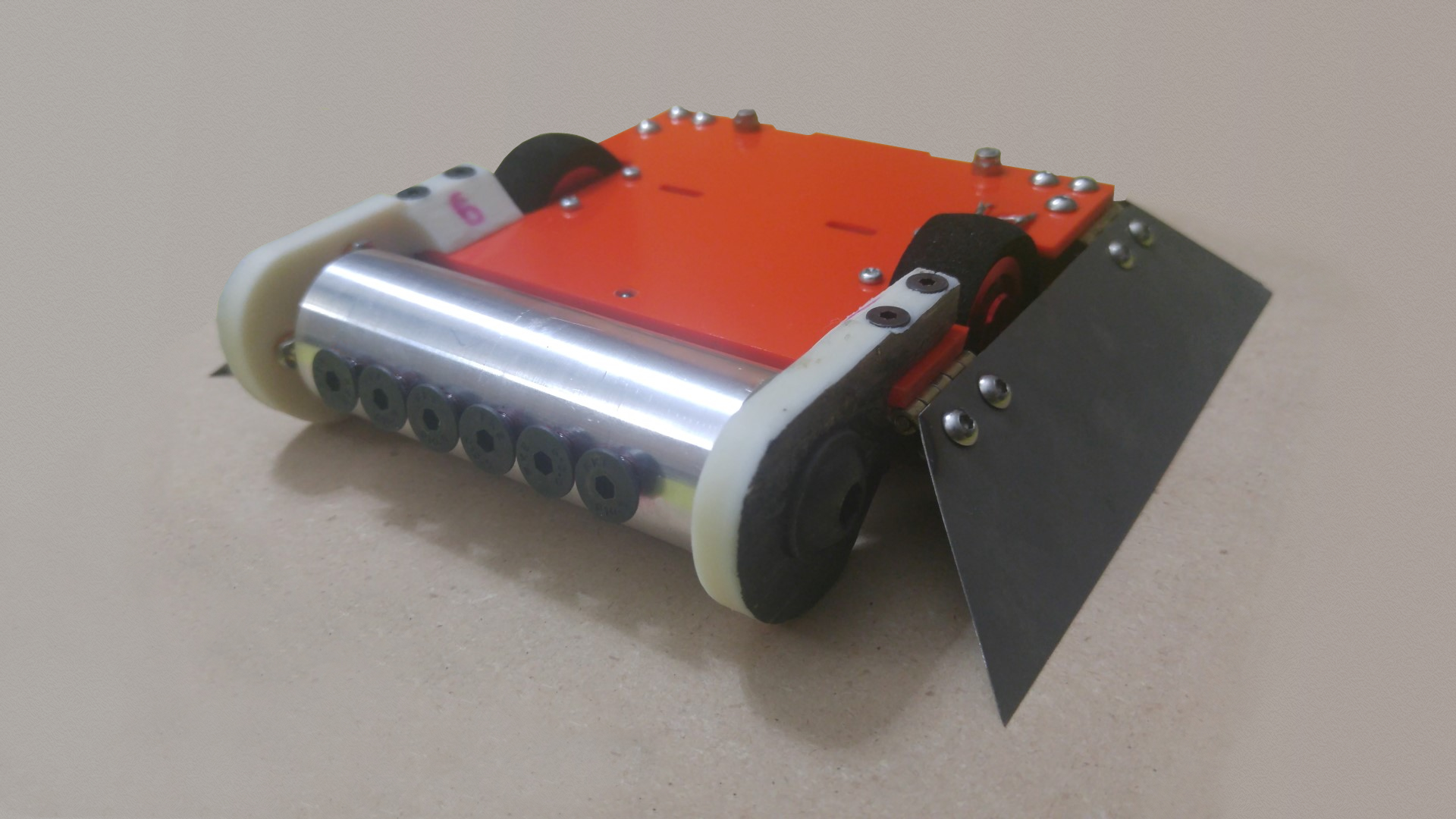
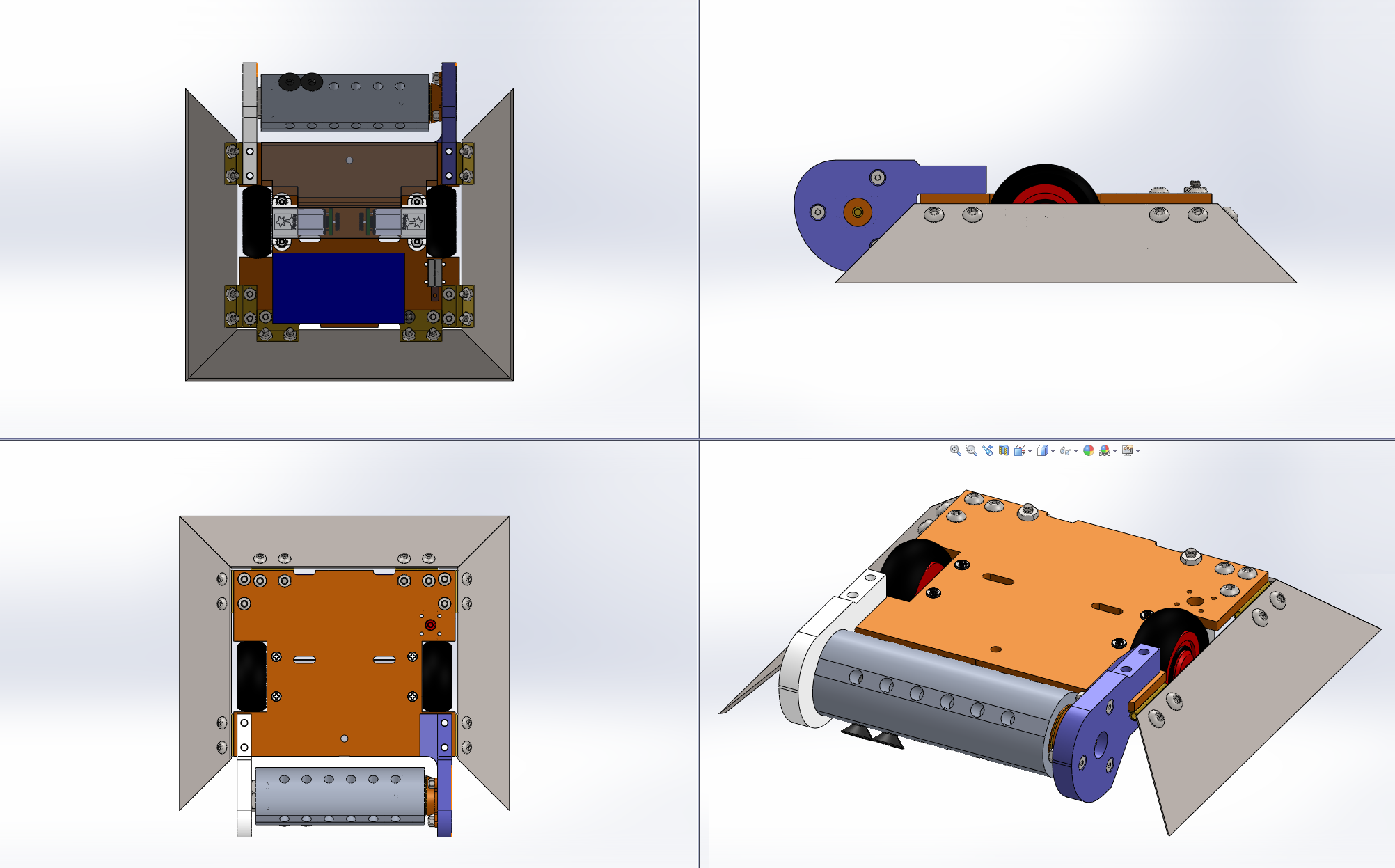
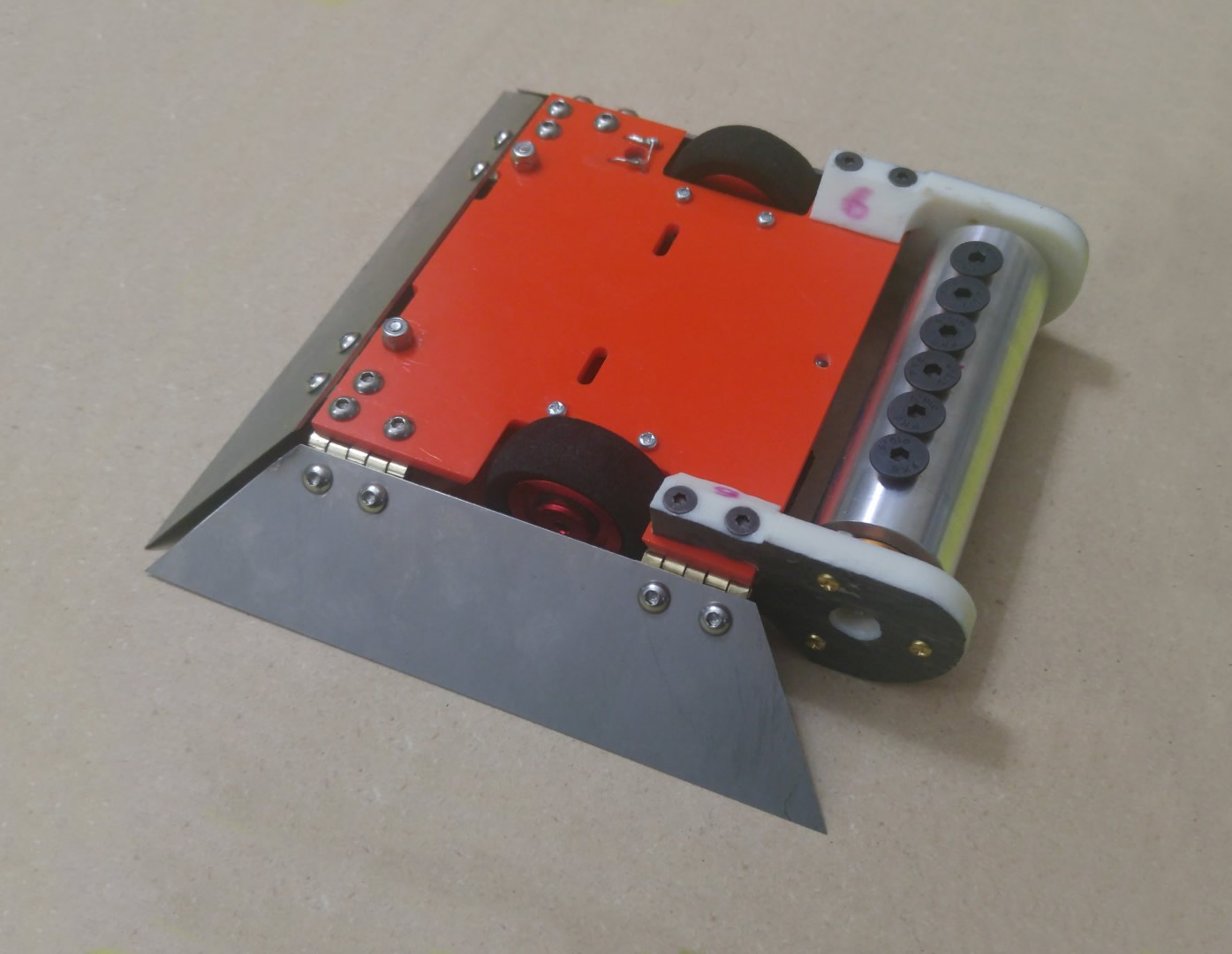
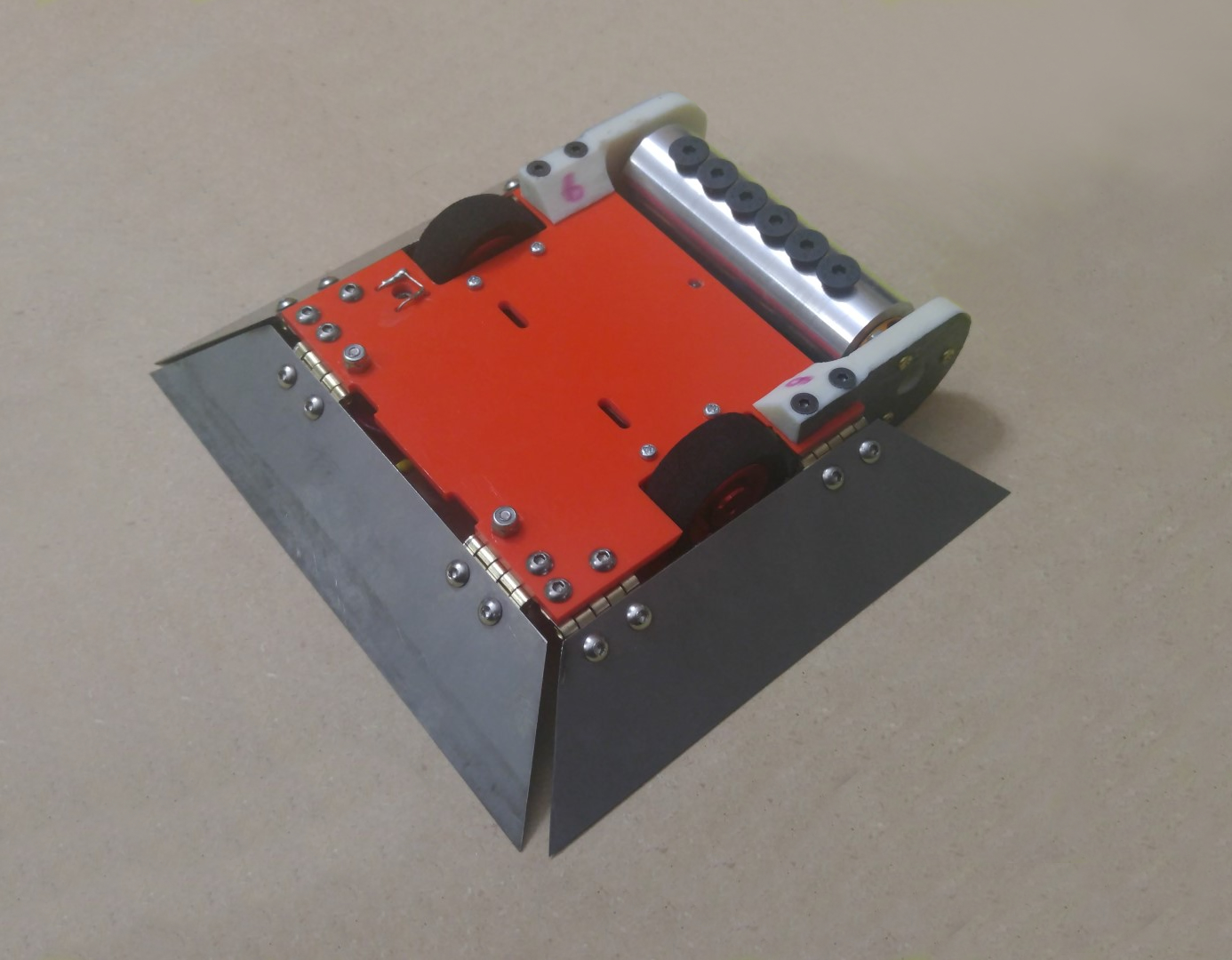
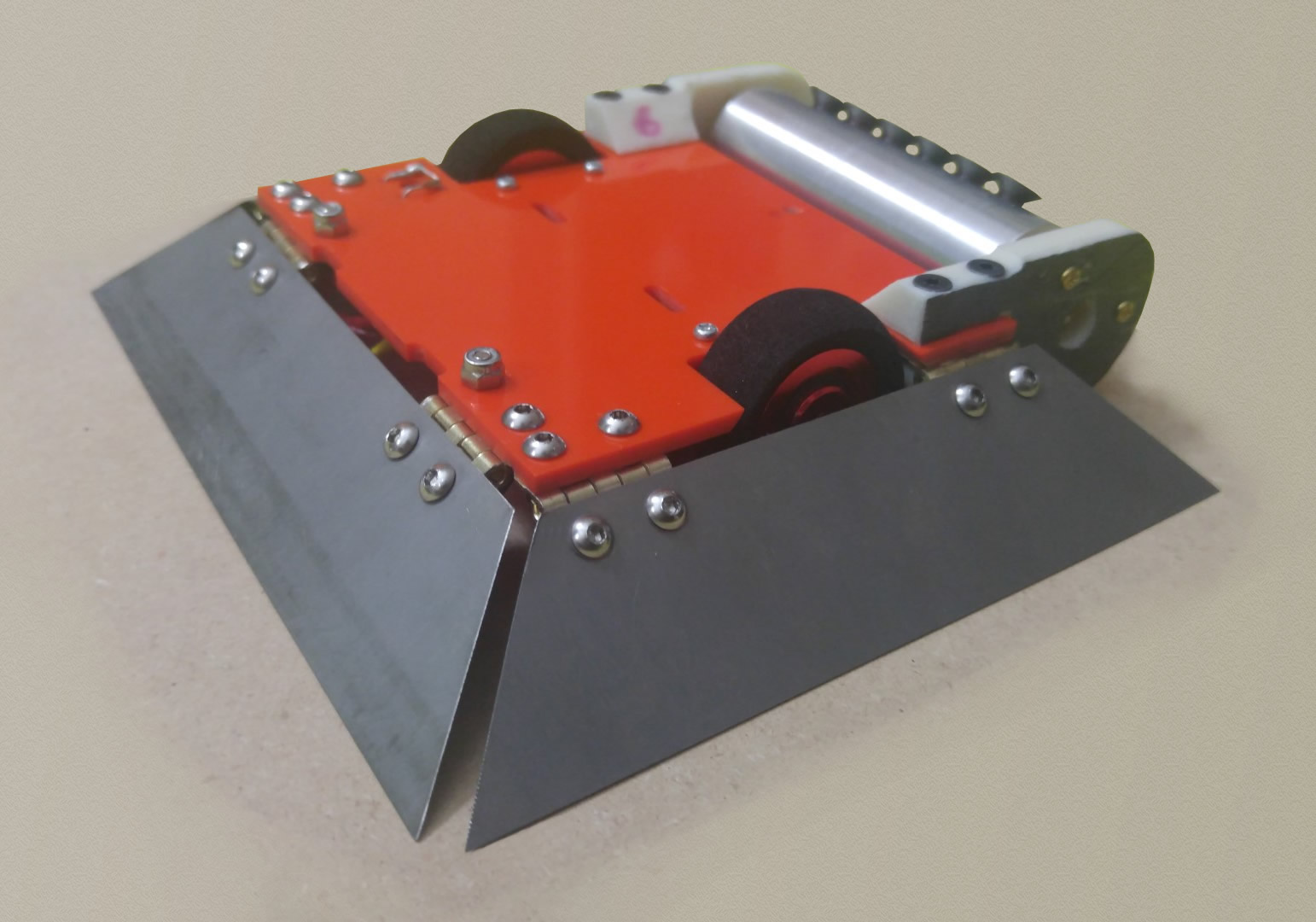
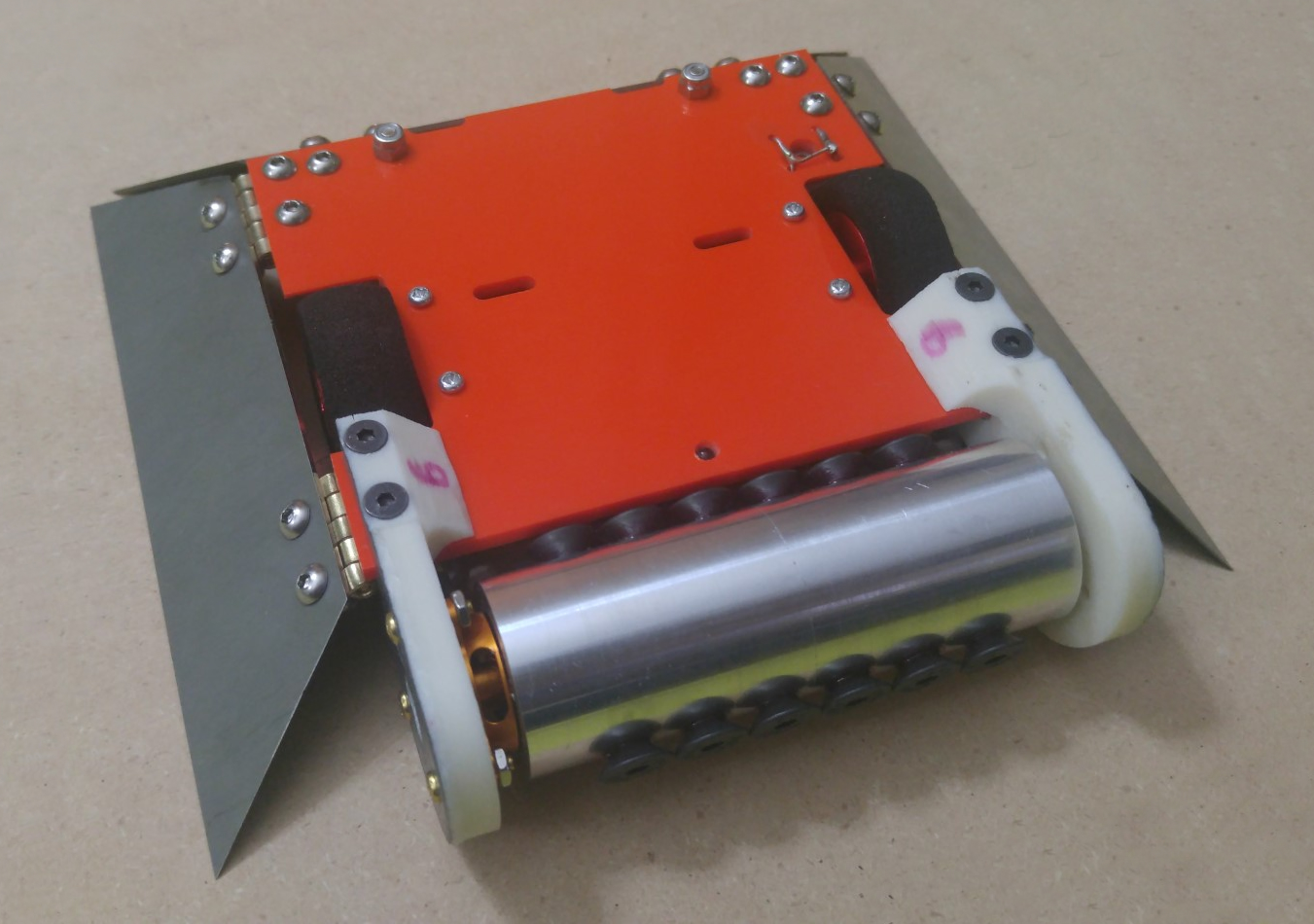
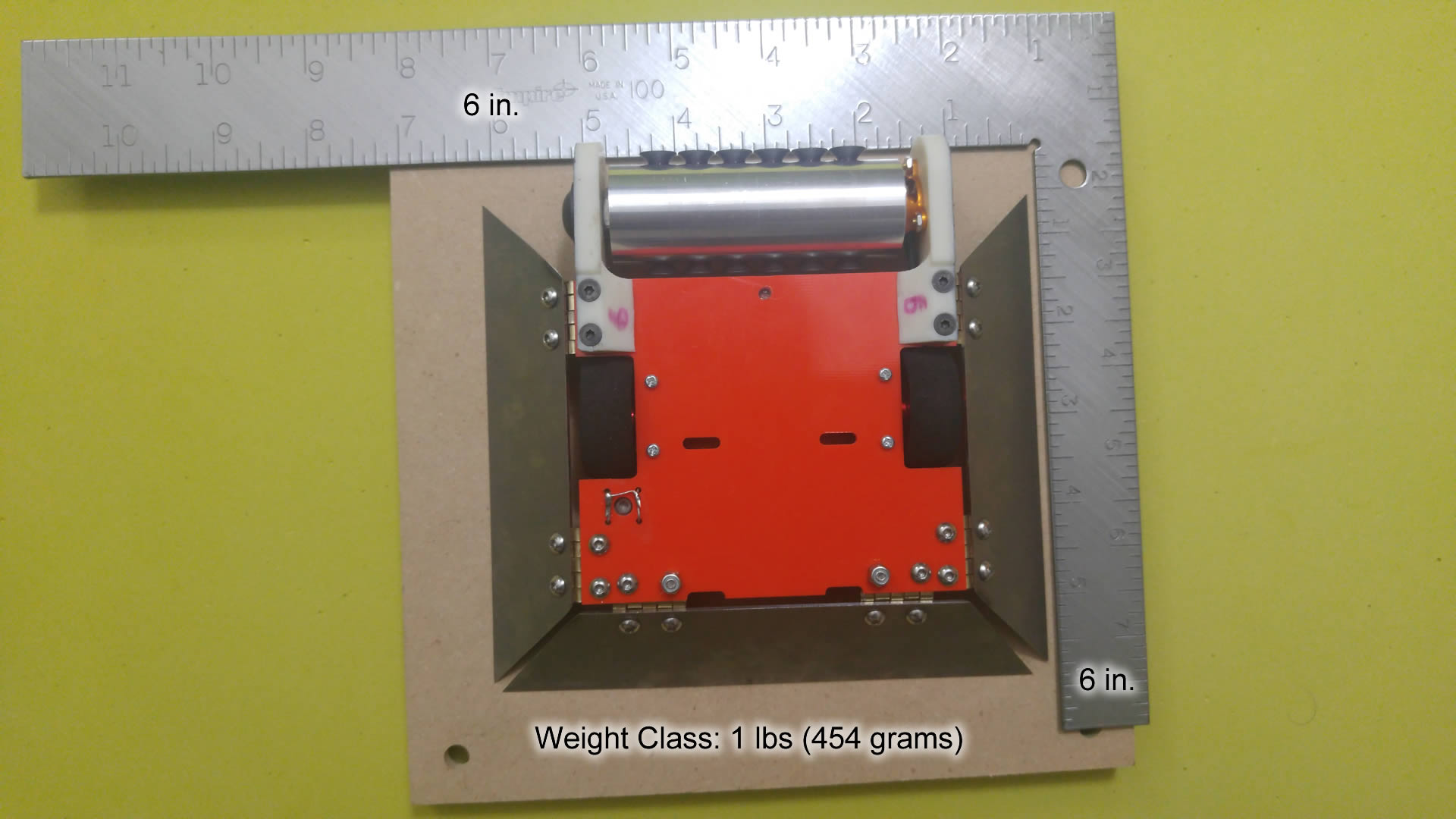
This is my first ever combat robot! 454 grams (1 lb American Antweight class). It has a spinning drum weapon.Body is made of Garolite, with titanium skirts mounted on hinges (parts are cut on my Nomad 883 Pro, and some 3D printing). The drum weapon is CNC lathed aluminum with a brushless motor inside. The electronics is all custom built, utilizing the 802.15.4 radio integrated in the ATmega256RFR2.
Want more details?
(more photos later)
The drive motor and gearbox were Sanyo styled micro gear motors from Pololu. The wheels are Fingertech foam wheels and hub. The battery is 2S 800mAH. The main power switch is a Fingertech power switch. The hinges are simply from Home Depot.
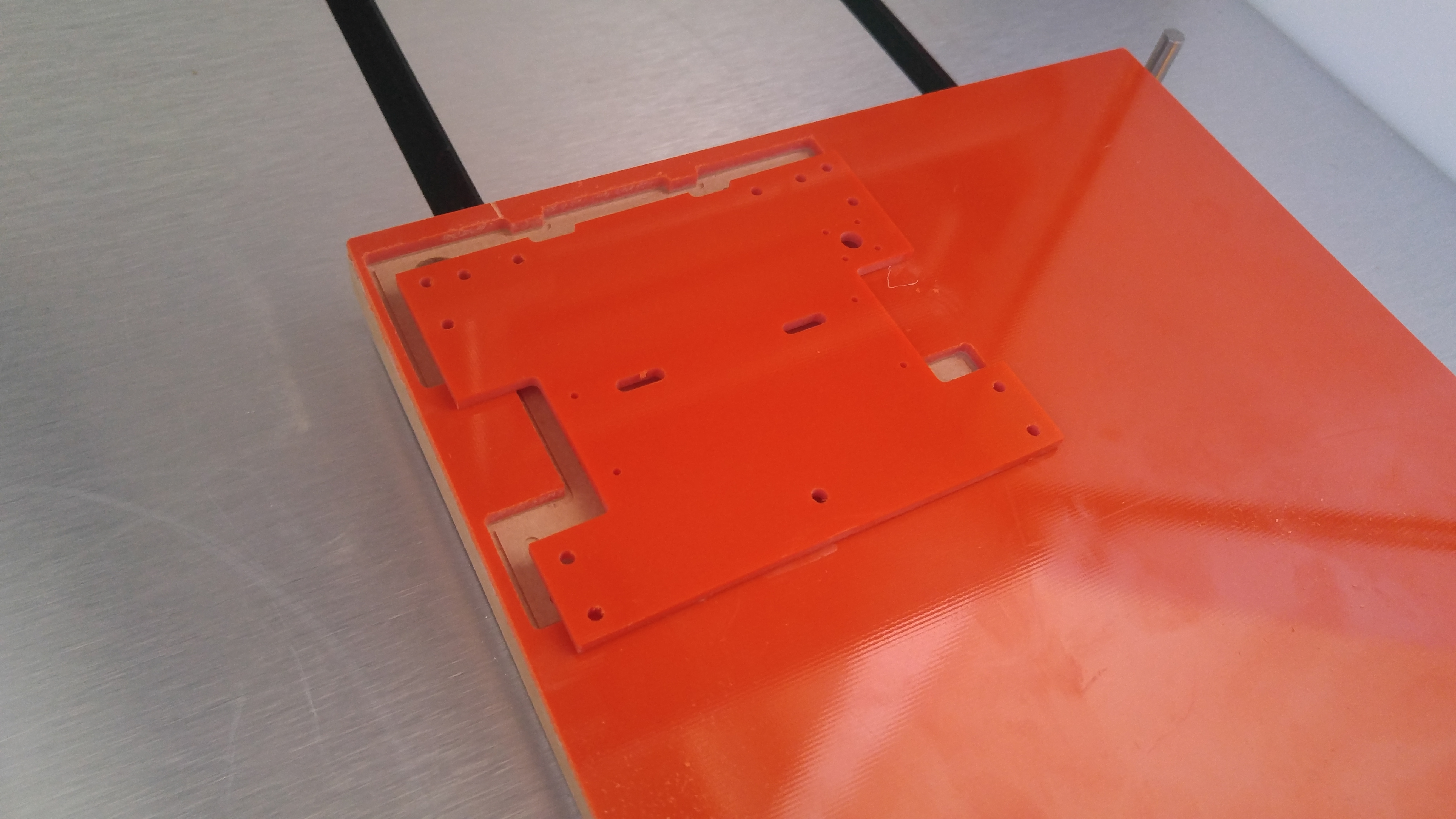
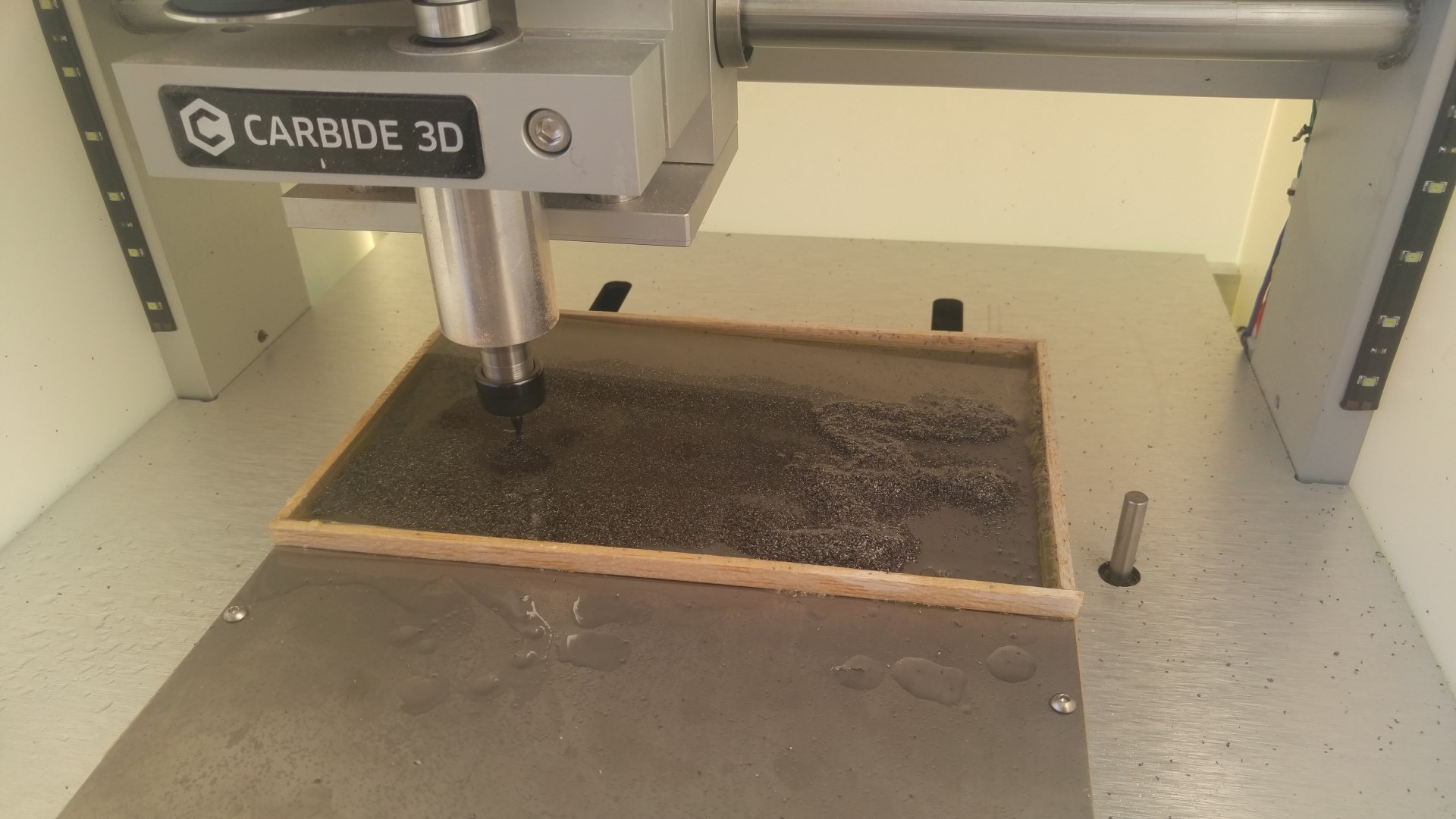
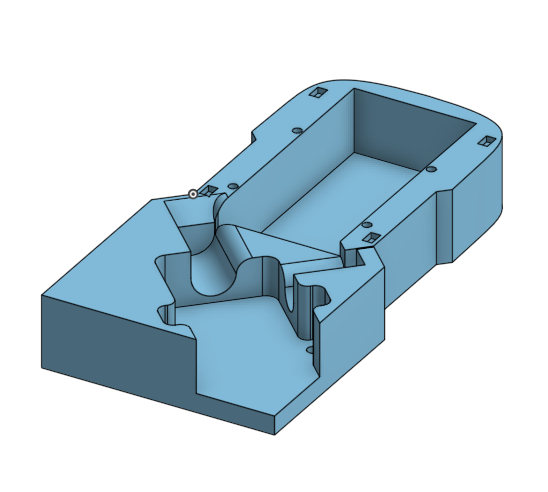
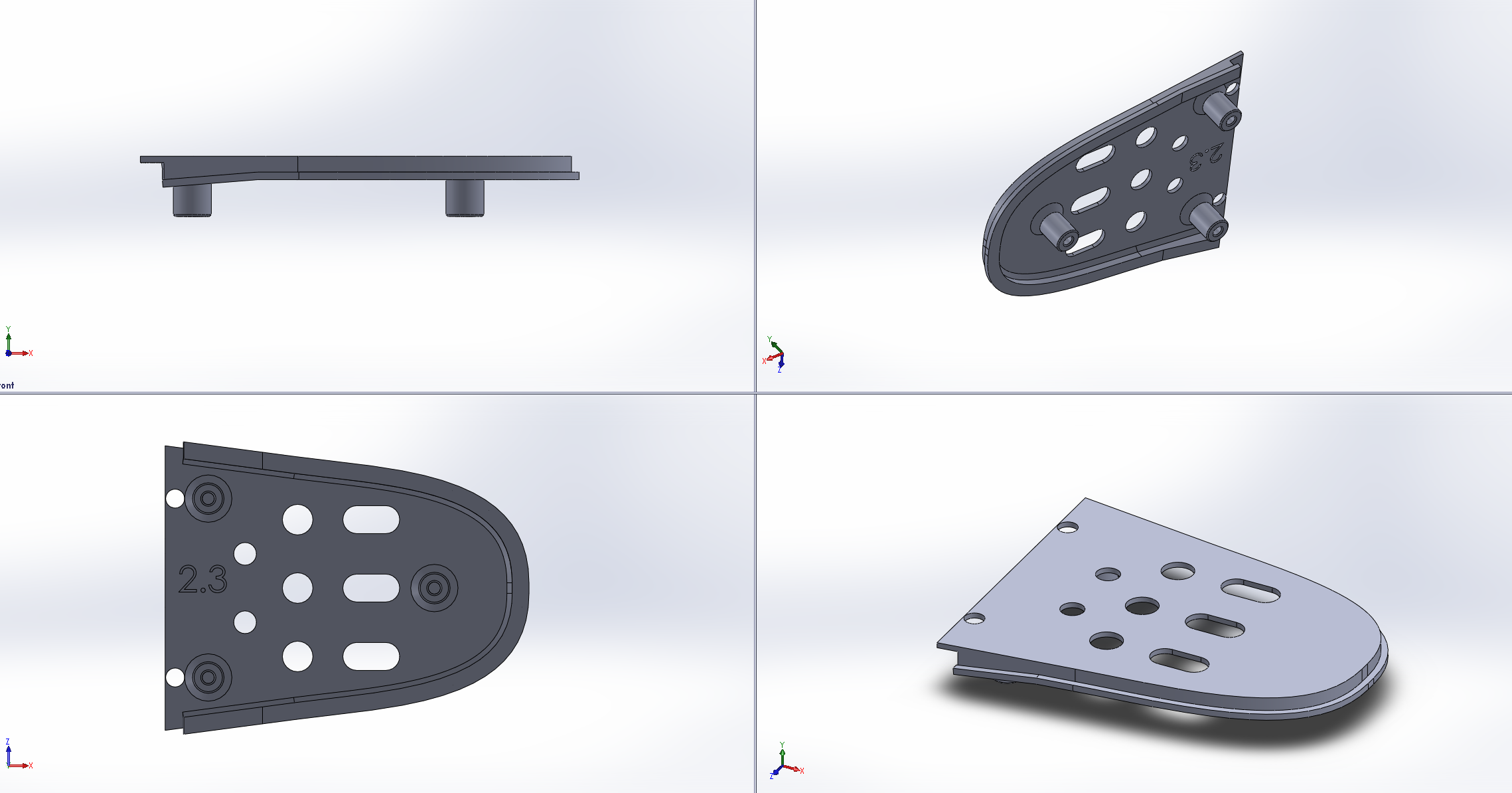
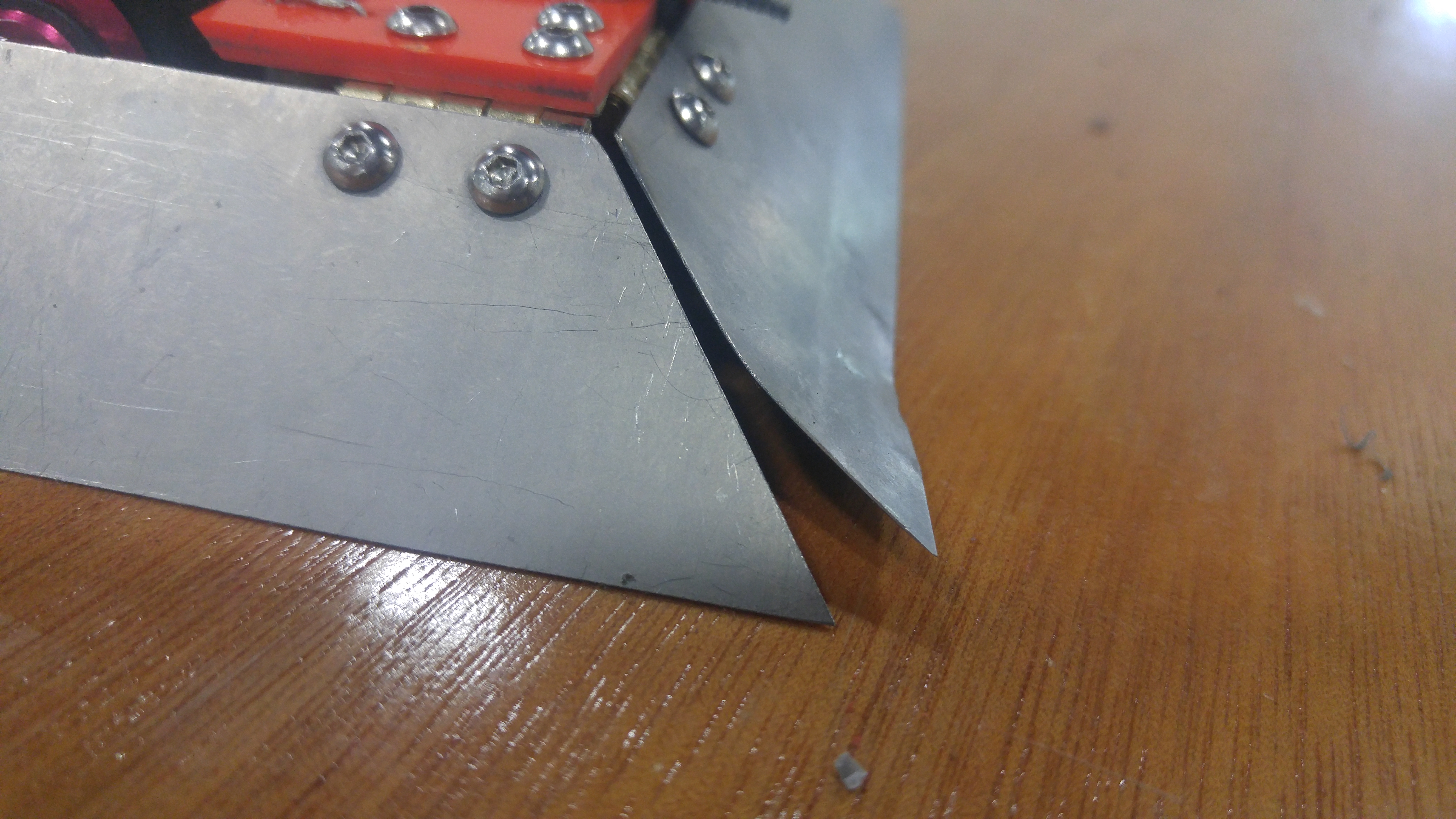
The body is Garolite, cut on a Nomad 883 Pro. The skirts are 1mm thick Gr5 titanium, also cut on a Nomad 883 Pro.

The drum was made by Proto Labs First Cut, which I find is very friendly to first time users. The automated quote response time is fast, and you can indicate where you want “special features” (thread taps, etc), using their web interface. All the price is then calculated in real time according to stuff like turn-around time, material, surface finish, etc. Super easy. Highly recommended. But… expensive. One drum made in 3 days cost me $160. That’s kind of insane but I bit that bullet.
For the remote transmitter, I first took a Hobbyking GT2E, completely gutted it, stuffed my own electronics in, 3D printed a new panel cover, and also 3D printed a massive boot to fit in bigger 18650 batteries and a WiFi signal amplifier. I also replaced the steering potentiometer with an optical encoder.



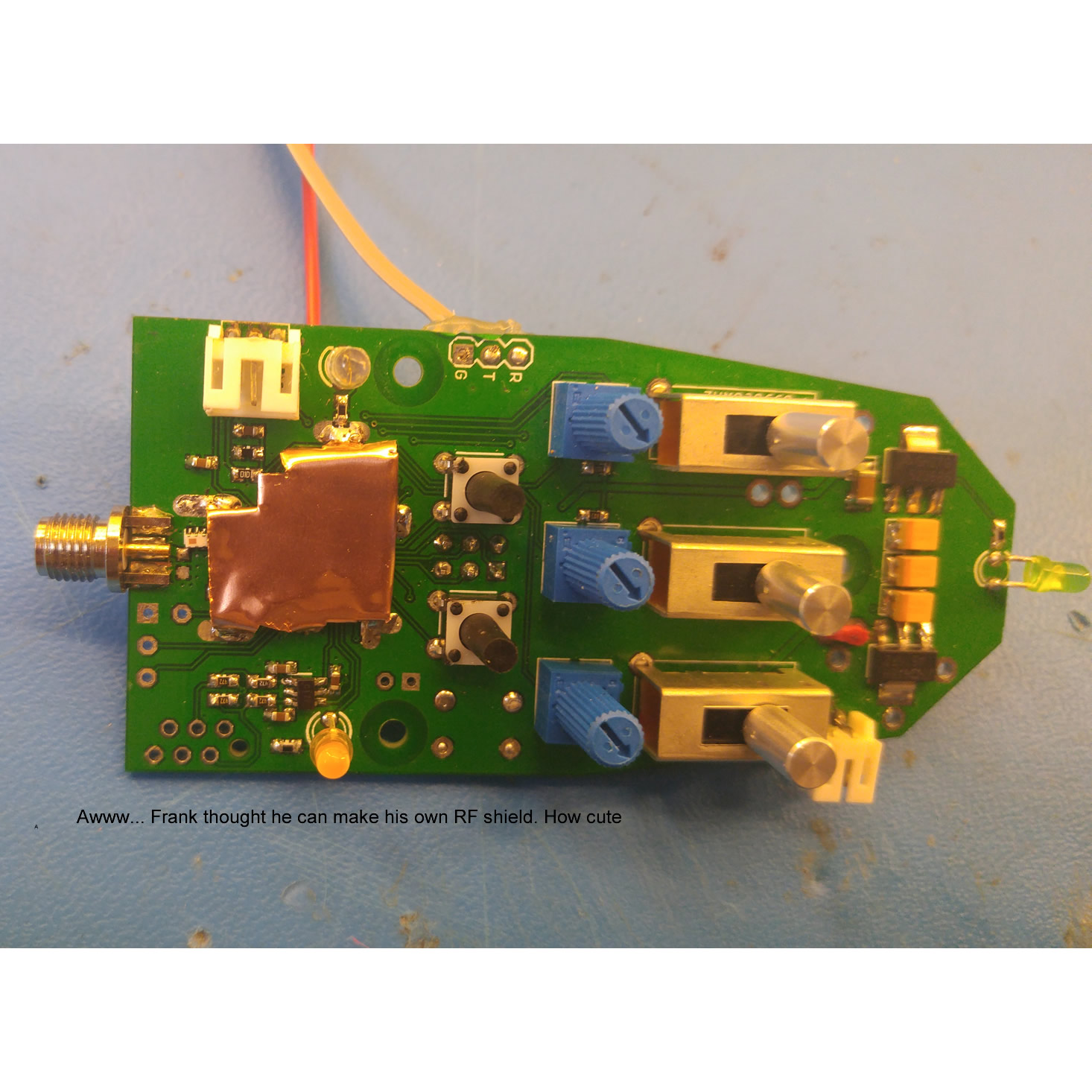
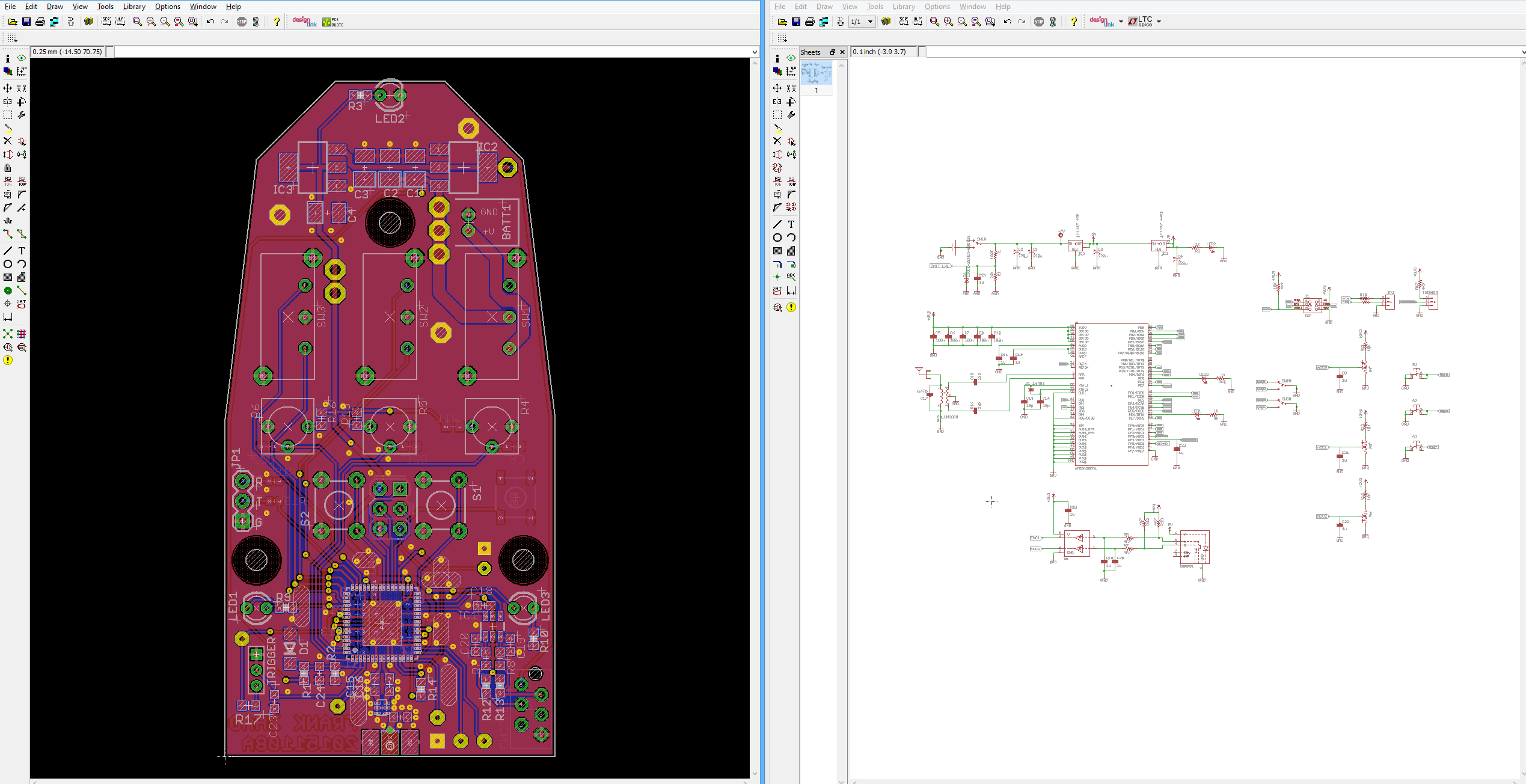
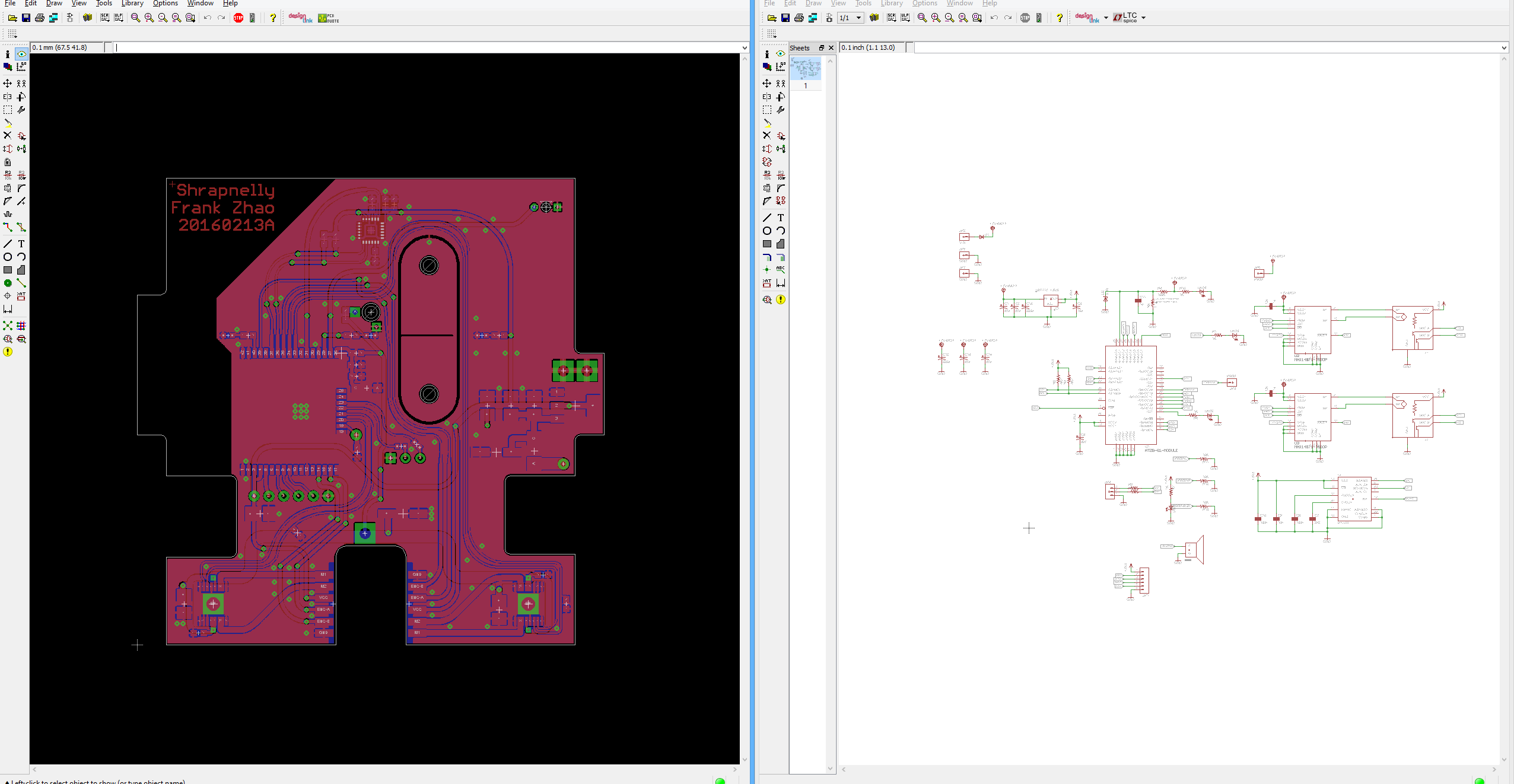
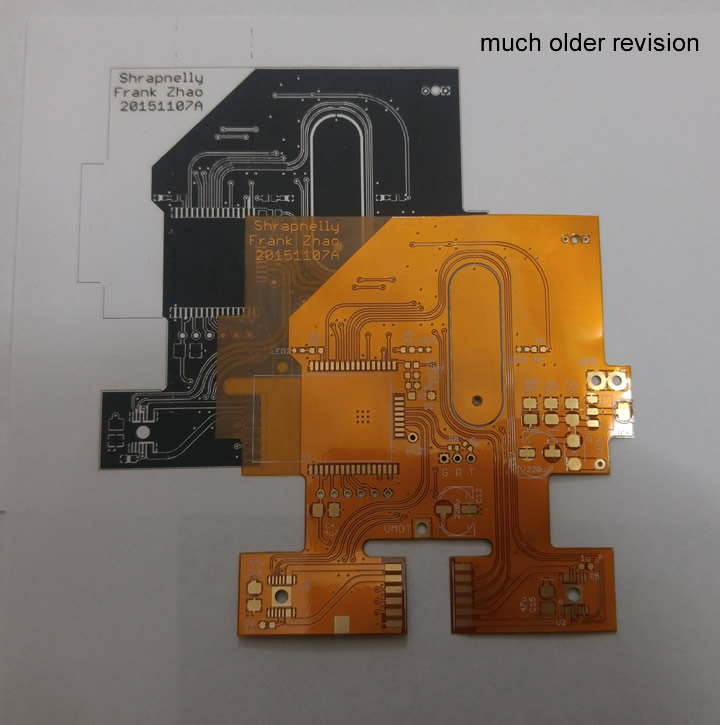
The robot’s circuit is actually using a (super expensive) flexible PCB (to save weight). This was a bad idea. I was actually too underweight, and the circuit itself was too fragile. Many connections at bending points broke. But… I love experimenting.
The original idea was that I use a 6-DOF IMU sensor (MPU-6050) and encoders to get absolute heading angle data, use encoders in the remote to transmit target absolute heading angle, and then use a PID loop to perform perfect steering. Think of it as using a mouse to play a video game versus using a console gamepad’s thumbsticks. Absolute vs relative. Additionally, I was hoping to utilize the gyro sensor’s readings to adjust the robot’s spinning drum speed, using the drum as a reaction wheel, I could have implemented “one wheel steering”, and regain traction if the robot is tilted. All of these ideas were never finished because of problems encountered during assembly. The code’s been written though.
The weapon motor’s ESC is a Afro 12A with a modified SimonK firmware. The firmware is modified to eliminate calibration, enable active braking at the highest setting, and brake when idle (original behavior is brake when signal is short, coast when signal is missing). These changes are made to improve startup reliability and to conform to the safety rules set by the competition.
I am pretty happy with the firmware I’ve written, even if some of it didn’t get utilized. I wrote a frequency hopping protocol that had many modes of messaging and telemetry, with the utmost focus on safety, because the ATmega256RFR2 allows you to break away from real 802.15.4 protocol. The way that the IMU data was gathered was non blocking, relying on interrupt service routines, as not to block the main thread. Both the robot and remote can be configured (and debugged) using a serial port adapter. My next combat robot will likely feature some of this code I will also try to add a telemetry display to the remote, I’ve actually started to write an Android app to display debug and to set configuration options, but I stopped since it wasn’t a priority.
RoboGames 2016
They changed the format of the Antweight division to single elimination. Shrapnelly lost in the first round to Flex, who had a pincer grabbing mechanism. He grabbed me and tossed me out the ring. Then we had rumbles, and in one of them, Shrapnelly was able to toss 3 robots out of the ring, juked one that drove out of the ring, and shoved 1 out of the ring. Then we had more rumbles and random 1v1s and it turns out that Shrapnelly is very likely to lose to grabbers, and easily damaged by other drum weapons, but do good when I can find a good spot to hit and easily flip an opponent over.
Damage Sustained
Shrapnelly took some beating. The worst came from other drum bots. It did survive a few hits from two beetleweights though. The final blow was dealt in a antweight rumble vs two other antweights, a spinner hit me in the wheel and it destroyed the gears in the gearbox.





Few More Fight Videos
Lessons Learned
My drum design was excellent (yes I would say that about my own design). It is a very conservative design, slightly smaller in diameter than what is typical, with a smaller motor than what is typical. I feared that it was too conservative, but having flipped over a few opponents and knocked them out of the arena, I say that I designed them to be the perfect size. The smaller motor also means a smaller ESC can be used. With these savings, you should invest in bigger drive motors and/or more armor.
Keep in mind, my drum is not powerful enough to shatter plastic armor like some bigger drums though.
The parts that hold the drum and motor to the chassis is 3D printed ABS-polycarbonate mix. Take a look at the damage to get an idea of how it survived some heavy hits.
1 mm thick titanium will bend when it gets hit with an Antweight weapon. Also, the pins holding the hinge together have a tendency of being knocked out. I do not recommend attempting a hinge-skirt design like mine.
The top of my robot is 3 mm thick Garolite, this was a mistake. The top of the robot needs the least amount of armor. In comparison, I had literally 0 armor on the bottom of my robot.
My Fingertech switch was held on by twist tying wires and hot glue, and it seems to hold on fine.
If you are designing your own H-bridge, you’ll want the motors to be in braking mode (either active braking or shorted to ground) all the time when idle.
The antweight arena has holes in the wall where you can be pushed out. The beetleweight arena does not.
My 2S 800mAH Li-Po pack would’ve probably lasted around 4 or 5 long matches. It’s way too much power. Go with a smaller pack.
Next Year
Fingertech Robotics, one of the event sponsors, was selling an unreleased beetleweight eggbeater (a drum but flatter) kit, for $44. In comparison, the drum Shrapnelly uses cost me $160. So I’m actually going to build a beetleweight and actually save money.
If some one desires expert view regarding running a blog then i
propose him/her to visit this webpage, Keep up the pleasant work.
This is really attention-grabbing, You are an overly professional blogger.
I’ve joined your feed and stay up for in the hunt for
extra of your fantastic post. Additionally, I have shared your site in my social networks
Wonderful items from you, man. I’ve keep in mind your stuff prior to and you’re simply too great.
I really like what you have obtained right here, really like what you’re stating and the best way wherein you say
it. You are making it entertaining and you continue to take care of
to keep it sensible. I can not wait to learn much more from you.
That is really a great site.
I conceive you have mentioned some very interesting details,
regards for the post.
This web site is my intake, very great design and style and Perfect written content.