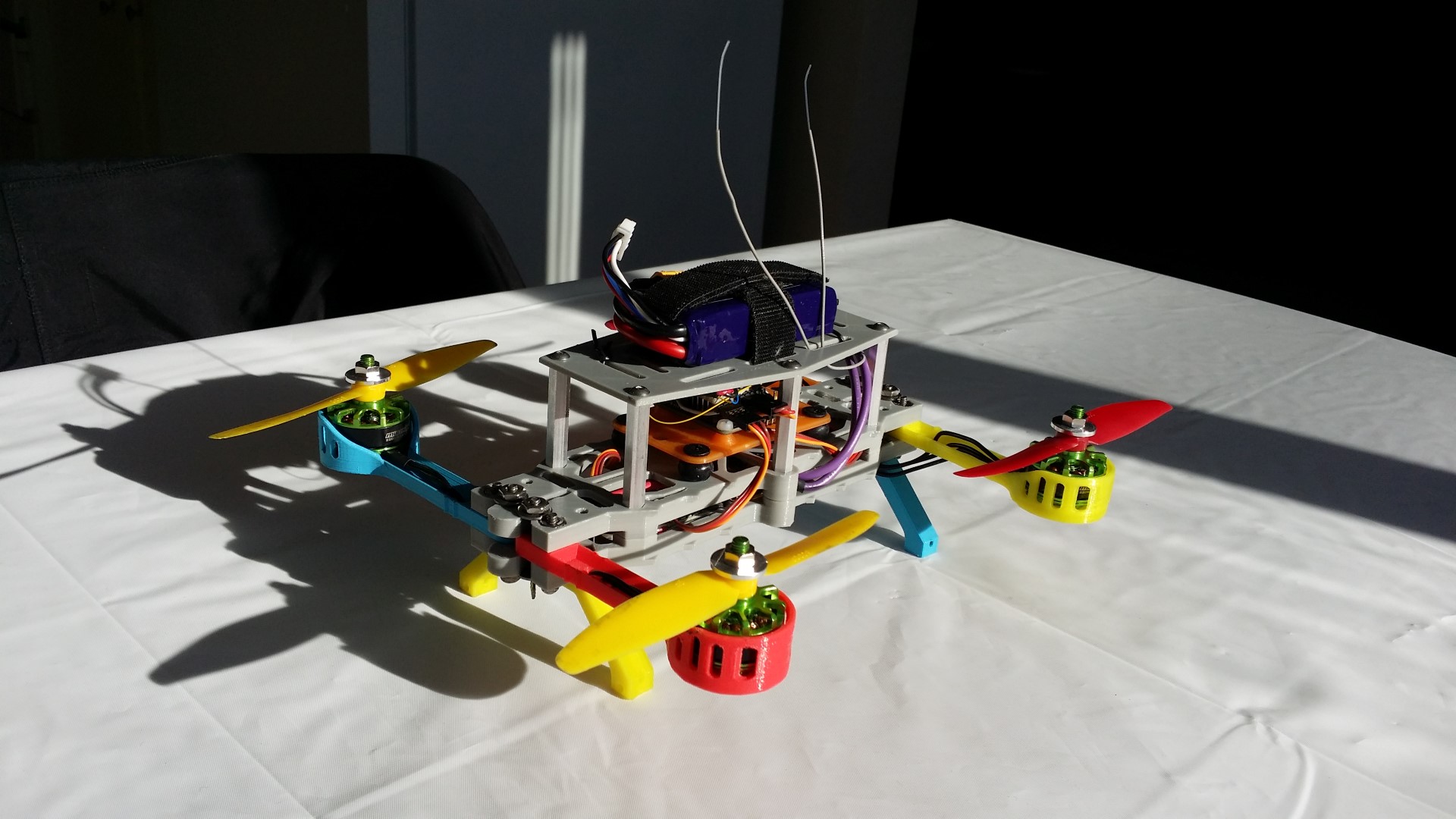

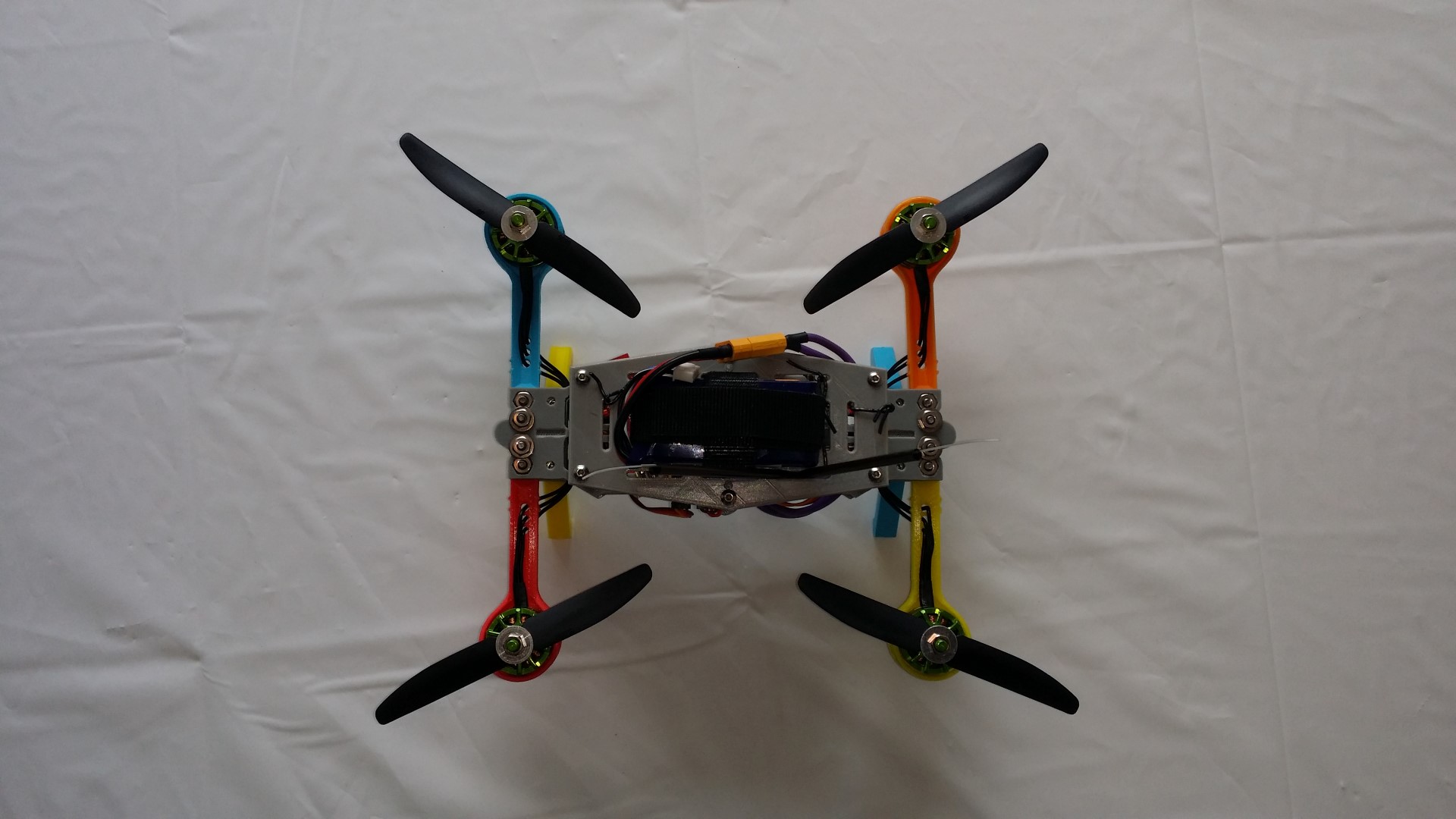
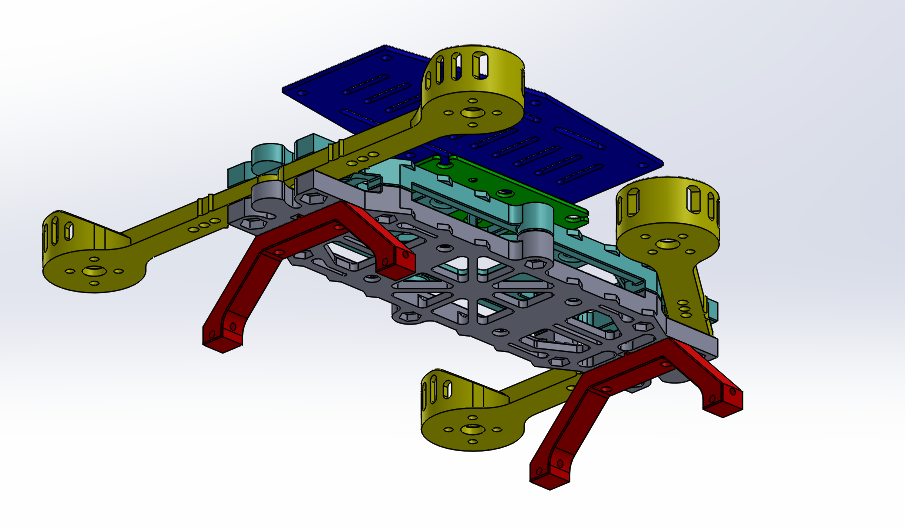
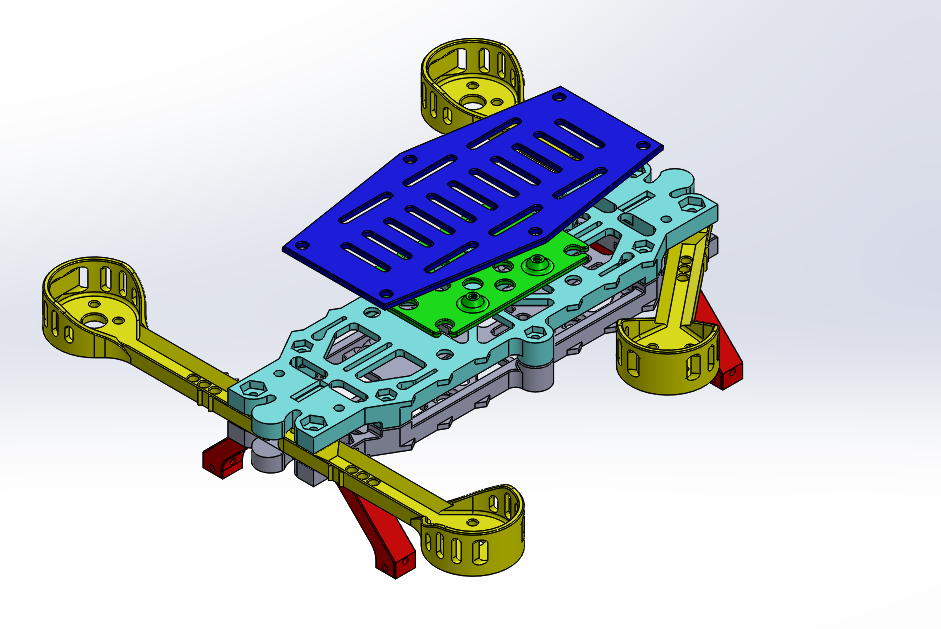
3D printed using my Ultimaker2 and many colors of PLA plastic at 100% in-fill. It is my first design, featuring folding arms, tucked away electronics, and anti-vibration mounted flight controller. It is designed to be friendly with FDM 3D printers, employing some special techniques. The frame is extremely strong.
http://youtu.be/z2xI3y_h1w4
I need more practice. I need to buy a few more propellers and few more batteries as well so I can practice for longer.
Flight controller is a Naze32 running customized baseflight firmware. Radio transmitter is a FrSky Taranis X9D running OpenTX, and the radio receiver is a hacked up FrSky X4R-SB. Motors are 2206-2150KV HobbyKing Baby Beast motors, controlled by Afro 12A ESCs with SimonK firmware. Propellers are 5030 Gemfan props. I also added a RN-42 Bluetooth module to make it easier to configure the Naze32 without a USB cable.
3D files are hosted on YouMagine if you are interested. I uploaded the source SLDPRT files and importable STEP files, I did not upload STL files on purpose. (posting STL files are the equivalent of posting a JPG of a circuit schematic, STL is good for printing, not good for editing, and I encourage 3D printer owners to post actual source files instead of STL files)
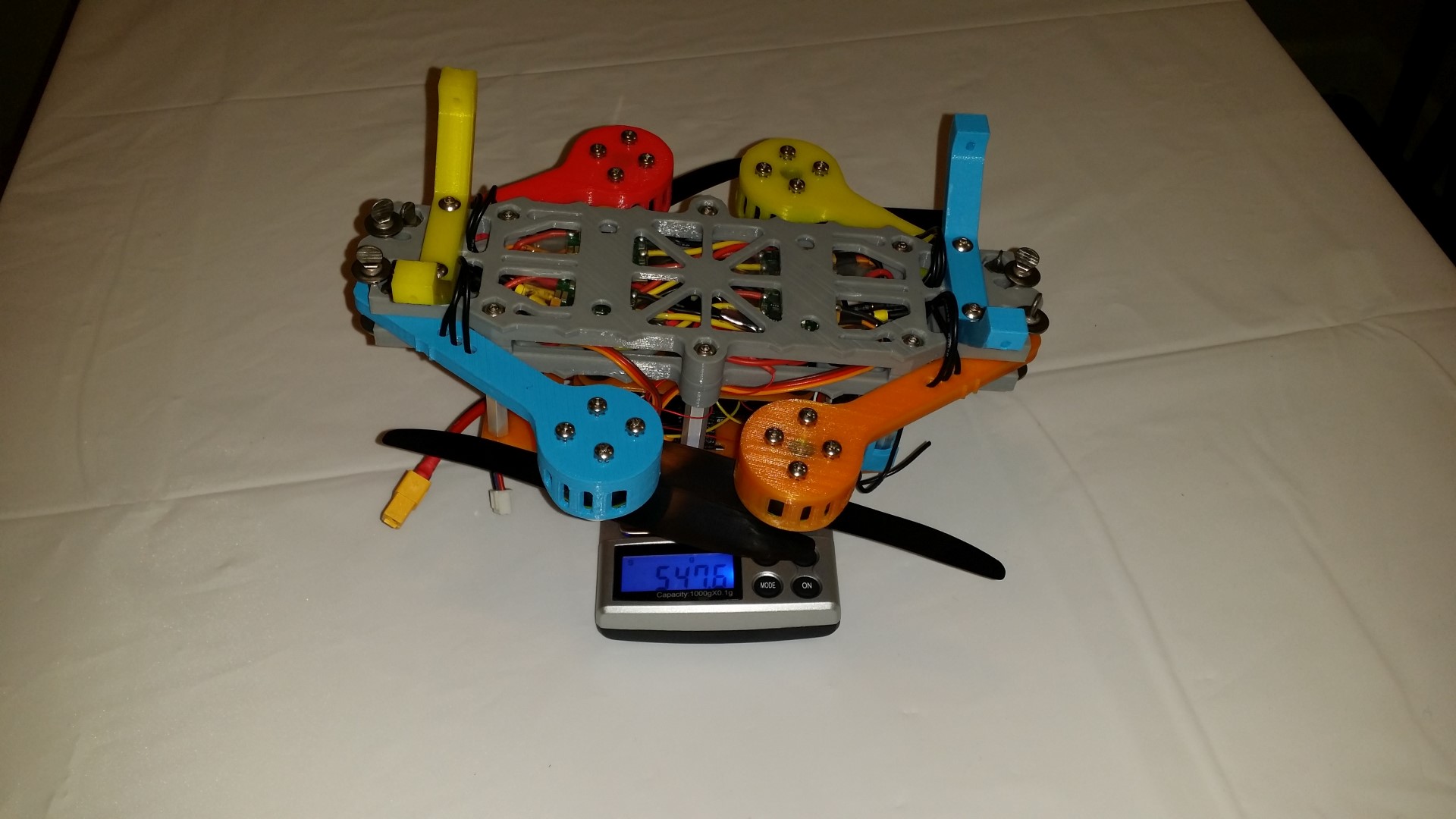
Although I am proud of this design, I don’t recommend it (so please don’t ask me for help with printing it or assembling it, I will want to tell you to design a better one instead) because it is very heavy. With a 1000 mAH 3S LiPo battery, the total weight is 550 grams. By comparison, other carbon fiber quadcopters at a similar size are around 400 grams even with FPV equipment mounted (mine does not). I can probably save a lot of weight by reducing the in-fill during printing, and not using metal standoffs. I will be working on another new design soon, starting from scratch again, not based off this design.
The Naze32 was chosen because it is highly open source (firmware is open source, schematic is sort of available), and reviews claims the default settings are very tuned-in already. It seems to live up to that claim so far, it didn’t fall out of the sky when I enabled auto-leveling.
The combination of the Naze32, Taranis, and X4R-SB makes for a great combination for tinkers like me. I was able to setup all sorts of stuff. I got the Taranis to send calibration commands to the Naze32 without editing the Naze32 firmware. Plus I did a bunch of hacks to the X4R-SB to enable S.BUS and S.PORT telemetry. I also got GPS working but I didn’t mount it yet.
Crafting my inaugural 3D printed quadcopter was a rewarding experience that merged my passion for aviation and technology. This project marked the beginning of an exciting adventure in the realm of aerial exploration.